


本文针对水下智能装备的推进技术,从专利总体趋势、地域分布、主要申请人、技术构成与发展动向等角度揭示该领域专利活动特征,为我国相关机构的专利布局对策提供事实依据。
1 专利申请总体发展趋势
通过法国Orbit Questel公司专利数据库进行检索,共得到水下机器人、深潜器、自治水下航行体等水下智能装备推进技术相关专利族450项1(数据检索日期为公开日1997年–2018年8月1日。)。
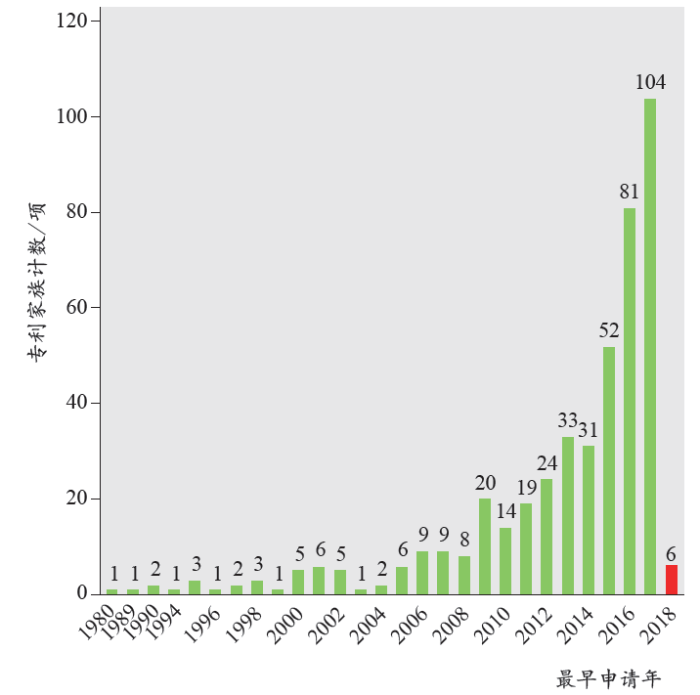
图1给出了专利申请数量的年度(基于最早申请年)分布情况。可以看出,2008年以前该技术发展缓慢,年申请量不足10项;2009–2014年为缓慢增长阶段,年申请量保持在20~30项;2015年起专利申请数量开始持续大幅增长,2017年的申请量达104项,至今仍热度不减2(由于专利从申请到公开到数据库收录有一定时间的延迟,图中近两年的数据,特别是2018年的数据会大幅小于实际数据,仅供参考。)。
图1
2 专利技术布局
从专利技术分布来看,水下智能装备推进技术领域主要包括以下几个方面:螺旋桨推进,占44.9%;仿生推进,占16.7%;泵喷推进,占8.9%;推进系统研究,占8.0%;推进器结构研究,占4.2%;磁流体推进,占3.3%;磁耦合推进,占2.4%;矢量推进,占2.2%;超空泡推进,占1.6%;其他推进技术,占7.8%。各技术领域专利申请数量见表1。
表1 水下智能装备推进技术构成
| 技术分类 | 专利申请数量/项 |
|---|---|
| 螺旋桨推进 | 202 |
| 仿生推进 | 75 |
| 泵喷推进 | 40 |
| 推进系统 | 36 |
| 其他推进技术 | 35 |
| 推进器结构 | 19 |
| 磁流体推进 | 15 |
| 磁耦合推进 | 11 |
| 矢量推进 | 10 |
| 超空泡推进 | 7 |
3 重要国家/地区分布
3.1 技术原创国分析
在专利分析中,同族专利的最早优先权国家分布或没有优先权的首次专利申请可以用来表征原创技术的分布情况。表2对水下智能装备推进技术专利的首次申请国、地区(组织)进行统计,分析发现,中国处于技术原创国的首位,其专利数量大幅领先于其他国家,占据了72.9%的份额;美国、拉脱维亚、韩国、俄罗斯、日本、德国、英国、乌克兰、法国等也是该项技术的主要技术原创国,但是专利数量与中国有较大的差距。
表2 水下智能装备推进技术专利首次申请国家/地区/组织分布
| 国家/地区/组织 | 专利申请数量/项 | 占比 | 国家/地区/组织 | 专利申请数量/项 | 占比 |
|---|---|---|---|---|---|
| 中国 | 328 | 72.9% | 乌克兰 | 5 | 1.1% |
| 美国 | 40 | 8.9% | 法国 | 4 | 0.9% |
| 拉脱维亚 | 15 | 3.3% | 土耳其 | 3 | 0.7% |
| 韩国 | 13 | 2.9% | 西班牙 | 2 | 0.4% |
| 俄罗斯 | 11 | 2.4% | 波兰 | 2 | 0.4% |
| 日本 | 10 | 2.2% | 世界知识产权组织 | 2 | 0.4% |
| 德国 | 8 | 1.8% | 丹麦 | 1 | 0.2% |
| 英国 | 5 | 1.1% | 中国台湾 | 1 | 0.2% |
3.2 专利技术流向分析
通过对专利受理国家、地区(组织)的分析,可以了解专利技术的战略布局和技术流向。技术原创国和技术目标申请国排名基本相似,可见中国、美国、拉脱维亚、韩国、俄罗斯、日本等不仅是水下机器人推进技术的主要技术原创地,也是主要技术保护地(见表3)。
表3 水下智能装备推进技术专利受理国家/地区/组织分析
| 国家/地区/组织 | 专利申请数量/项 | 占比 | 国家/地区/组织 | 专利申请数量/项 | 占比 |
|---|---|---|---|---|---|
| 中国 | 330 | 73.3% | 日本 | 6 | 1.3% |
| 美国 | 46 | 10.2% | 乌克兰 | 5 | 1.1% |
| 拉脱维亚 | 15 | 3.3% | 英国 | 4 | 0.9% |
| 韩国 | 11 | 2.4% | 法国 | 2 | 0.4% |
| 俄罗斯 | 11 | 2.4% | 波兰 | 2 | 0.4% |
| 世界知识产权组织 | 9 | 2.0% | 西班牙 | 1 | 0.2% |
| 德国 | 7 | 1.6% | 中国台湾 | 1 | 0.2% |
4 高被引专利分析
被引超过10次以上的专利共计26项,来源于5个技术原创国:美国、中国、英国、韩国和日本,其中美国13项,中国8项,英国和韩国各2项,日本1项。从专利被引次数来看,高被引专利被美国、日本和英国掌握,被引次数最高的是由美国Geiger,Michael B申请的泵喷推进专利技术,被引高达105次。中国专利最高被引17次,是哈尔滨工业大学2006年申请的胸鳍波动仿生推进技术。中国在专利被引用方面与美国、日本、英国的差距较大(表4)。
表4 水下智能装备推进技术部分高被引专利列表
| 序号 | 公开号 | 申请年 | 技术原创国家 | 总被引次数/他引次数 | 专利技术 | 申请人(专利权人) |
|---|---|---|---|---|---|---|
| 1 | US5947051 | 1997 | US | 105/105 | 泵喷推进 | Geiger; Michael B |
| 2 | US6692318 | 2002 | US | 66/66 | 泵喷推进 | 宾夕法尼亚州立大学研究基金会(Penn.State Research Foundation) |
| 3 | US7290496 | 2006 | US | 49/49 | 泵喷推进 | 阿卜杜拉二世国王发展基金(King Abdullah II Fund for Development) |
| 4 | US6089178 | 1998 | JP | 47/43 | 翼控制推进器 | 三菱重工业株式会社(Mitsubishi Heavy Industries) |
| 5 | US6725797 | 2000 | US | 39/37 | 超空泡推进 | Hilleman Terry B |
| 6 | US6247666 | 1998 | US | 23/19 | 鳍式推进器 | 洛克希德马丁沃特系统公司(Lockheed Martin Vought Systems) |
| 7 | CN101519116 | 2008 | GB | 22/20 | 超导转子绕组的推进马达和电力转换器 | 通用电气能源能量变换技术有限公司(GE Energy Power Conversion Technology) |
| 8 | US6482054 | 2001 | US | 22/22 | 全电动力隧道推进器 | 宾夕法尼亚州立大学研究基金会(Penn.State Research Foundation) |
| 9 | US6739266 | 2003 | US | 18/15 | 超空泡推进 | 美国海军 |
| 10 | CN100374352 | 2006 | CN | 17/17 | 胸鳍波动仿生推进 | 哈尔滨工业大学 |
| 11 | US5758592 | 1997 | US | 16/15 | 泵推进 | 美国海军 |
| 12 | US6849247 | 2002 | US | 15/15 | 超空泡推进 | 美国海军 |
| 13 | US6572422 | 2001 | US | 14/14 | 螺旋桨推进 | 蒙特利湾水族馆研究所(Monterey Bay Aquarium Research Institute) |
| 14 | CN100506639 | 2007 | CN | 14/13 | 螺旋桨推进 | 哈尔滨工程大学 |
| 15 | GB200021822 | 2000 | GB | 14/14 | 涡轮机蒸汽驱动 | 英国Rotech Holdings有限责任公司 |
| 16 | US5702273 | 1996 | US | 13/12 | 螺旋桨推进 | 美国海军 |
| 17 | US5603279 | 1995 | US | 13/13 | 泵喷推进器 | 美国公司Performance 1 Marine Inc. |
| 18 | CN2811163 | 2005 | CN | 12/11 | 仿鱼尾推进 | 哈尔滨工程大学 |
| 19 | CN202499268 | 2012 | CN | 11/11 | 仿生推进器 | 台州职业技术学院 |
| 20 | CN101508335 | 2009 | CN | 11/10 | 螺旋桨推进 | 天津大学 |
| 21 | CN104029805 | 2014 | CN | 11/9 | 螺旋桨推进 | 上海大学 |
| 22 | US20060246790 | 2005 | US | 11/11 | 喷水推进 | 洛克希德马丁公司(Lockheed Martin) |
| 23 | CN103998186 | 2012 | KR | 11/9 | 其他推进器 | 韩国海洋科学技术院(Korea Institute of Ocean Science & Technology) |
| 24 | CN101913418 | 2010 | CN | 10/9 | 泵喷推进 | 华南理工大学;广州市番禺灵山造船厂有限公司 |
| 25 | CN104029197 | 2014 | CN | 10/6 | 螺旋桨推进 | 山东大学 |
| 26 | KR20080093536 | 2007 | KR | 10/9 | 螺旋桨推进 | 大宇造船海洋株式会社(Daewoo Shipbuilding & Marine Engineering Co., Ltd) |
5 专利申请人分析
5.1 申请人排名
表5列出了专利公开数量在5件以上的机构,共有15家,其中12家中国机构的专利数量占15家机构专利总量的82%;3家国外机构占18%。
表5 全球水下智能装备推进技术专利公开量排名前15机构
| 序号 | 机构 | 专利家族数/项 |
|---|---|---|
| 1 | 哈尔滨工程大学 | 39 |
| 2 | 中国科学院沈阳自动化研究所 | 23 |
| 3 | 天津深之蓝海洋设备科技有限公司 | 20 |
| 4 | 浙江大学 | 17 |
| 5 | 拉脱维亚里加工业大学(Rigas Tehniska Universitate) | 15 |
| 6 | 美国海军 | 12 |
| 7 | 乐清市风杰电子科技有限公司 | 7 |
| 8 | 河北工业大学 | 6 |
| 9 | 江苏科技大学 | 6 |
| 10 | 马鞍山福来伊环保科技有限公司 | 6 |
| 11 | 上海大学 | 6 |
| 12 | 乌克兰马卡洛夫国立大学(Admiral Makarov National University) | 5 |
| 13 | 北京航空航天大学 | 5 |
| 14 | 广州市番禺灵山造船厂有限公司 | 5 |
| 15 | 华南理工大学 | 5 |
5.2 申请人研发趋势分析
从一个公司的专利申请历史可以预测其未来研发趋势。从图2可以看出,排名靠前的几家机构主要分为以下几类。第一类是研发历史较长,专利产出平稳的机构,主要有哈尔滨工程大学、中国科学院沈阳自动化研究所、浙江大学、拉脱维亚里加工业大学(Rigas Tehniska Universitate),该类机构早在2010年之前已经开始相关研究。第二类是入行时间短,研发较活跃,年公开量尚少的机构,主要有上海大学、江苏科技大学、河北工业大学、天津深之蓝海洋设备科技有限公司。第三类是近两年刚入行的机构,主要是侧重技术服务的公司,如乐清市风杰电子科技有限公司、马鞍山福来伊环保科技有限公司。第四类机构已基本退出该研究领域,它们自2013年至今未见公开相关专利,主要有美国海军(US Navy)、乌克兰马卡洛夫国立大学(Admiral Makarov National University)、北京航空航天大学、广州市番禺灵山造船厂有限公司、华南理工大学。
图2

5.3 被引次数最多的申请人排名
通过专利被引指标,可以从一定程度上反映一个机构在该领域的技术影响力,图3为总被引次数排名前列的机构,可以看出,哈尔滨工程大学、美国海军、华南理工大学、上海大学、广州市番禺灵山造船厂有限公司、天津大学、中国科学院沈阳自动化研究所等其他机构引用次数(他引次数)最多,在该技术领域的影响力较大。
图3

5.4 重点申请人分析
排名前11位申请人的专利概况、专利技术领域、研发重点及重点专利见表6。可以看出:(1)哈尔滨工程大学、中国科学院沈阳自动化研究所和浙江大学专利数量位居前列,研究时间长,专利产出稳定,在该技术领域的影响力较大。(2)上海大学、江苏科技大学、河北工业大学、天津深之蓝海洋设备科技有限公司近几年研发活跃,涉足该领域时间较短,专利总量还较少。(3)乐清市风杰电子科技有限公司、马鞍山福来伊环保科技有限公司近两年开始涉足该领域,侧重于专利技术服务。(4)国外机构拉脱维亚里加工业大学研发状态稳定,美国海军实验室2015年后未再公开新的专利。(5)各机构研发侧重有所不同:哈尔滨工程大学侧重仿生推进和螺旋桨推进的研究;中国科学院沈阳自动化研究所以推进器系统(结构)和推进控制系统为研究重点;浙江大学、上海大学、江苏科技大学致力于螺旋桨推进技术的研究;河北工业大学在螺旋桨推进、仿生推进和磁耦合推进技术方面均有涉及;天津深之蓝海洋设备科技有限公司涉及面广泛,拥有悬挂推进器组方面的重点专利。
表6 重点申请人专利信息列表
| 序号 | 机构名称 | 申请专利/项 | 公开年份 | 法律状态 | 专利技术领域 | 研发重点 | 重点专利 | 备注 |
|---|---|---|---|---|---|---|---|---|
| 1 | 哈尔滨工程大学 | 39 | 2006–2013 | 授权12项,在审13项,失效14项 | 仿生推进、螺旋桨推进、推进器故障检测、泵喷推进、磁耦合推进、矢量推进、推力优化分配、液压推进、推进器动力学仿真、推进器位姿控制。 | 仿生推进和螺旋桨推进,各占36%、26% | “六自由度水下机器人变向旋转轴推进器(CN101003300)”、“一种仿鱼尾推进系统的机械传动装置(CN2811163)” | 这2项重点专利技术被20家单位引用达26次。 |
| 2 | 中国科学院沈阳自动化研究所 | 23 | 2010–2018 | 获授权12项,在审6项,失效5项 | 推进器系统(结构)、螺旋桨推进、推进控制系统、磁耦合推进、矢量推进。 | 推进器系统(结构)、螺旋桨推进、推进控制系统 | “一种水下机器人推进装置的布置结构(CN104648643)”和“水下机器人用推进装置(CN205327384U)” | 这2项重点专利技术被哈尔滨工程大学等4家单位引用达9次。 |
| 3 | 天津深之蓝海洋设备科技有限公司 | 19 | 2016–2018 | 螺旋桨推进、磁耦合推进、推进器电机、悬挂推进器组、推进器齿轮、推进器尾盖、推进器通信隔离。 | 螺旋桨推进、磁耦合推进 | “一种用于水下机器人的动力系统及水下机器人(CN105836080)” | 专业从事全系列水下机器人及相关水下核心部件研发、制造、销售的高新科技企业,提供自主水下航行器(AUV)、水下滑翔机(Underwater Glider) 以及缆控水下机器人(ROV)等小型水下运动载体的相关技术解决方案和产品。 | |
| 4 | 浙江大学 | 16 | 2014–2018 | 发明12项,授权4 项,在审5项,撤回3项,实用新型4项 | 螺旋桨推进、泵喷推进、磁耦合推进、机翼推进、矢量推进、容错系统 | 螺旋桨推进 | “一种波浪力驱动的海面滑翔机(CN104149959B)” | 重点专利被上海航士海洋装备有限公司、武汉理工大学、哈尔滨工程大学引用,致力于波浪能驱动的滑翔机、水下机器人技术的研发。 |
| 5 | 河北工业大学 | 5 | 2016–2018 | 获授权3项,在审1项,无效1项 | 螺旋桨推进、仿生推进、磁耦合推进。 | 螺旋桨推进、仿生推进 | “一种微小型模块化AUV(CN105711777B)” | 水下机器人的研究主要由武建国研究团队主持,重点专利被河海大学、西安兰海动力科技有限公司2家单位引用进行水下机器人航行器的整体性能研究开发。 |
| 6 | 上海大学 | 6 | 2014–2018 | 螺旋桨推进、泵喷推进、推进器监测系统 | 螺旋桨推进 | “一种浅水探测水下球形机器人(CN104029805)” | 重点专利被5家单位引用11次进行水下机器人动力驱动、控制系统、推进装置等方面的研究开发。 | |
| 7 | 江苏科技大学 | 6 | 2014–2018 | 螺旋桨推进、推进系统、推进器监测系统 | 螺旋桨推进 | “全向浮游爬壁水下机器人(CN103600821B)” 、“倾转桨潜水器(CN104369849)” | “船舶、海洋、蚕桑”为江苏科技大学三大学科领域特色 | |
| 8 | 乐清市风杰电子科技有限公司 | 7 | 2017–2018 | 授权7项 | 螺旋桨推进 | 螺旋桨推进 | “一种能以任意角度驱动的水下机器人(CN107380382B)” | 近两年开始涉足该领域,侧重于专利技术服务 |
| 9 | 马鞍山福来伊环保科技有限公司 | 6 | 2014–2017 | 授权3项、在审3项 | 仿生推进、磁流体推进 | 仿生推进 | “一种仿生微型水下机器人(CN207015566U)” | 近两年开始涉足该领域,侧重于专利技术服务 |
| 10 | 拉脱维亚里加工业大学 (Rigas Tehniska Universitate) | 15 | 2009–2018 | 仿生推进、螺旋浆推进、其他推进技术 | 仿生推进 | “Fin vibrating actuator of water vehicle(LV14907)” | 里加工业大学是拉脱维亚一所以理工科类为主的综合性公立大学,位于首都里加,主要致力于仿生推进技术研究,研发状态稳定。专利公开时间集中于2009–2014年,2015–2017年没有专利产出,2018年公开1项。 | |
| 11 | 美国海军 | 13 | 1997–2014 | 螺旋浆推进、泵喷推进、超空泡推进、仿生推进 | 超空泡推进、泵喷推进 | “High-speed supercavitating underwater vehicle(US6739266)”、“Undersea vehicle propulsion and attitude control system(US5758592)” | 美国海军部在水下智能研究领域具有国际领先的研发水平,超空泡推进和泵喷推进技术被引次数较高,螺旋浆推进占比近半。2015年后未再公开新的专利。 |
6 结论
随着海洋探测、海洋开发的发展,水下智能装备的应用领域在不断拓宽,对推进技术的要求也越来越高,螺旋桨推进技术在不断完善,喷水推进技术在近几十年中得到迅速发展,磁流体推进和仿生推进技术还不是很成熟,目前尚未制造出可以大量应用的高效产品。为此,世界各国一直在不断探索新的推进方式。从专利分析结果看,从2015年起专利申请数量开始持续大幅增长,国内外对水下智能装备推进技术的研究热度在不断上升。我国起步虽晚,但自2013年以来发展迅速,专利公开量已居世界首位,但核心技术数量不足,高被引专利仍被美国、日本、英国掌握。本文以期通过对水下机器人智能装备推进技术专利的分析,帮助企业及研究机构了解国内外专利发展态势,增强知识产权意识,把握发展先机,及时跟踪研究国外核心专利技术及其专利战略,促进我国水下智能装备的发展。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}