

机器人技术是一个多学科研究领域,涵盖人工智能、自动控制系统、生物材料和纳米技术等广泛领域。
创新性研究对未来的研究具有重要的促进作用和影响力。研究质量比产出数量更加重要。通过利用其他技术促进机器人技术不断创新至关重要。
机器人技术研究趋势
自大规模生产时代起,机器人从自动化机器开始就一直在不断进化,并陆续应用于诸多领域。尤其是随着机器人技术研究的进步,机器人已在广泛领域内迅速发挥自身价值,包括工业制造、医疗应用、农业和汽车行业。机器人规格和应用领域不断扩大,而机器人技术是聚焦这些创新的研究领域之一。
机器人的概念起源于希腊神话。在中世纪时期,人们便曾尝试开发早期机器人模型。伴随着工业革命和批量生产制造方法的引入,自动化研究实现了真正腾飞。随着自动化系统向自主系统的发展,创新性机器人技术研究和应用领域在全球范围内不断扩展,前景无限广阔。
图1

通过对全球前1.5万篇高被引机器人技术论文的分析,显示机器人技术已在多个领域有所发展,包括计算机科学、自动控制、电气/电子工程、机械工程和生物医学(图2)。
图2

图2
机器人技术领域深入研究——基于全球引用次数最多的前1.5万篇论文
来源:Derwent Innovation专利地图,Web of Science核心版集合,2007–2016年。
$\bullet$机器学习:近年来利用人工智能开发机器人学习能力的研究
$\bullet$机器操控:机械设备的运动和行为研究
$\bullet$人机界面(MMI):人类与机器人交互通信的研究
$\bullet$控制算法:调度/规划算法控制研究
$\bullet$医学应用:医学领域机器人研究
美国和中国发表的机器人技术研究论文相对较多,日本和韩国也发表了大量研究论文,同样欧洲国家也在机器人技术研究上做出了广泛贡献(图3)。
图3

图3
机器人技术研究文献排名前10的国家
来源:Web of Science核心版集合,2007–2016年。
注:2007–2016年,Web of Science核心版集合收录的全球机器人技术论文数量93 192篇。
具有影响力(高被引)的论文数量与研究论文产出数量一样,已成为衡量总体研究绩效的一项重要指标。分析显示美国在机器人研究领域占据主导地位;而中国发表的论文大部分影响力相对较低。德国的论文发表数量略微落后于日本,但其研究影响力更大(图4)。
图4
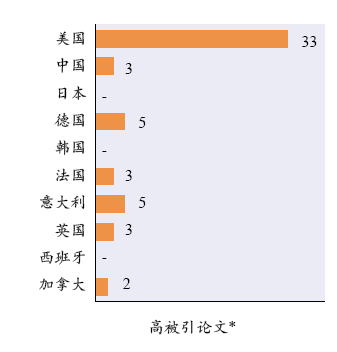
图4
机器人技术相关论文排名前10的国家/地区研究绩效分析
来源:Web of Science核心版集合,2007–2016年。
* 过去10年间发表的被研究人员引用最多的论文。
韩国和日本发表的论文有0.7%~0.8%会进入全球引用次数最多的前1%论文中,而中国这一比例是0.35%;而美国和德国的比例则高达3%(图5)。
图5

图5
机器人技术相关论文排名前10的国家/地区研究绩效分析
来源:Web of Science核心版集合,2007–2016年。
*分析期内全球引用次数最多的前1%论文。
**分析期内全球引用次数最多的前10%论文。
美国和中国均在机器人技术领域进行了大量研究,但中国的研究影响力低于世界平均水平。分析显示,亚洲国家的研究影响力低于世界平均水平,而欧洲国家的研究影响力则相对高于世界平均水平(图6)。
图6

图6
机器人技术相关论文排名前10的国家/地区的引文影响力*
来源:Web of Science核心版集合,2007–016年。
* 一项研究绩效评估指标,分析研究成果被全球其他研究人员引用的情况。创新性研究和优势研究更可能被其他研究人员引用。
由于最近的研究绩效更注重研究质量而非数量,一些国家可能需要将重点放在如何产出更具影响力的研究成果上。
学科规范化引文影响力(CNCI)
学科规范化引文影响力(CNCI)指根据特定学科、特定年份、特定文献类型计算得出的规范化的引文影响力数值。
由于研究属性和全球平均值(1.0)因研究课题类别而异,引文影响力水平计算方式各有不同。研究机构可以使用CNCI通过与全球平均水平的对比评估所发表的研究论文的影响力。CNCI信息可供研究人员、机构和InCites™的研究成果使用。
以下是关于机器人技术研究绩效的全面分析。如果针对特定学科领域进行分析,国家/地区和/或机构的排名可能有所变化。
基于机器人技术研究论文数量,图7列出了世界排名前10位的机构。
图7

就论文发表数量而言,许多亚洲机构排名很高,但其学科规范化引文影响力却低于全球平均水平,而美国和欧洲机构发表的研究成果则相对具有较高影响力。
机器人技术相关研究学科
机器人技术研究是一项跨学科研究。如图8所示,机器人技术研究领域涉及广泛,包括计算机科学、电气工程、机械工程甚至医疗应用。
图8
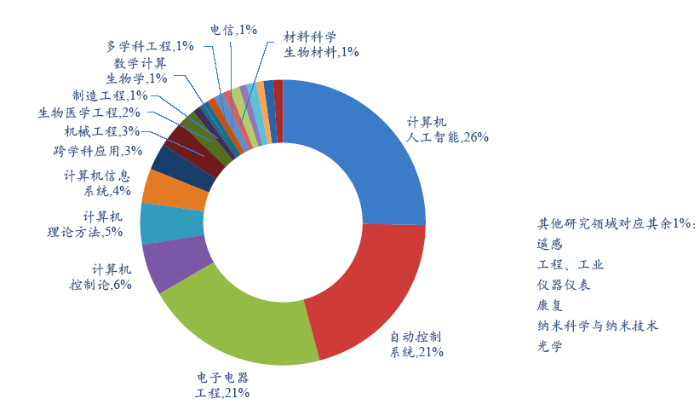
图9

图10

企业机器人技术研究
全球企业也在积极开展机器人技术研究,其中汽车公司尤其活跃。
企业与学术机构/研究机构之间的研究合作呈增长趋势。这为企业提供了更多利用外部创新资源的机会,同时学术/研究机构也可以获得更多研究资金。
本田汽车公司正积极与世界各地的诸多研究机构展开合作,包括日本、欧洲和美国的研究机构。合作研究领域包括与比勒费尔德大学合作的机器学习、手势识别以及机器人三维物体识别研究。此外,本田汽车公司还与东京理工大学合作开展语音识别研究。
隶属于卡耐基梅隆大学机器人研究所(RIA)的国家机器人工程中心(NREC)是一家从事机器人研究与开发的研究机构。
NREC与政府、研究实验室和企业密切合作,以推动机器人技术从概念设计到商业化的进程。从快速概念验证开始,经过开发和测试,到模型制造、专利申请以及对外授权,NREC实施了多个项目。NREC从各类软件开发、系统集成和现场测试工作中积累了大量最佳实践。NREC致力于开发一套真正能够实际利用机器人研究成果的系统。基于此,包括美国国家航空航天局(NASA)、五角大楼(国防部)在内的很多政府机构、创业公司和企业都在积极参与机器人技术研究。
卡耐基梅隆大学的研究人员(教授、工作人员和工程师)以及许多外部机构也正在参与并形成一个多学科环境,为产生发明创新创造条件。
机器人技术领域的新兴研究
基于对机器人相关研究论文发表数据的一项高级分析,我们发现某些特定学科近年来的影响力显著提升。这些学科已经在较短时期内吸引了全球大量研究人员,因此,需要密切关注这些新兴研究领域的潜力。
国家机器人工程中心(NREC)的各种项目
• 使用软件工具设计机器人。
• 使用3D 打印机制造机器人。
• 机器人由软件工具设计并通过3D打印机制造。可以使用拖放法创建组件,用户可据此制造所需要类型的机器人。
• 能够收集周围环境的各种信息并以3D方式识别周围物体的设备。另外还加强了在浓尘、大雾、降雨等恶劣环境中识别能力的研究。
• 无人驾驶车辆跟随技术测试。该测试包括在与其他车辆实时协作的同时识别地形并完成小组任务。
无缆柔体机器人
这是一种依靠硅胶或生物化学材料而非机械连接来移动的机器人,由流动压力或者化学反应力驱动。这种机器人的移动方式与一个借助周围地形进行活动的灵活生物相似。20世纪末期以来,通过借鉴生命有机体的特点已经开发了多种形式的柔体机器人,并且在最近 3~4年间这类机器人的研究更加活跃。
群体机器人
群体机器人是由多个机器人协同执行任务的一种形式。根据不同目的或周围环境,多个机器人相互协作灵活执行任务。该技术可以应用于无人机,多架无人机通过相互通信合作执行任务。机器人通过应用人工智能技术并模仿自然界中群居生物的行为从而智能地完成任务。
仿生微型机器人
这是一种利用各种生物系统概念制造的小型或微型机器人。这种微型机器人能够实施医疗手术,例如靶向治疗或在人体内的其他操作。此外,还开展了使用不同机制的运动研究,包括小型机器人模仿昆虫和其他种类生物的运动研究。这些研究可用于军事目的。
最近发布的关于机器人技术研究的一份分析报告显示,使用纳米技术的DNA折纸机器人、使用消融技术的腹腔镜外科机器人、人工分子机及更多机器人已经在短期内产生了较大的研究影响力。这些研究学科不断创新,向更先进的研究领域迈进。
机器人技术专利家族的全球趋势
分析显示,机器人技术方向的发明数量在全球呈现持续增长态势(图11)。
图11

发明构思和专利数量
一个发明构思可以在不同国家/地区申请专利。因此,专利/专利申请的数量可能超过发明数量。为了了解关于创新的信息,我们倾向于对发明构思(体现为DWPI专利家族)而非专利记录的数量加以分析。
机器人技术领域专利家族前10大机构
世界各地的很多企业和机构都在提交机器人领域的专利申请。据分析,许多日本企业在这一领域申请了专利;其中有2家日本汽车公司进入了10大机构榜单(图12)。
图12

该榜单中亚洲国家高度密集,包括韩国三星公司和中国国家电网。
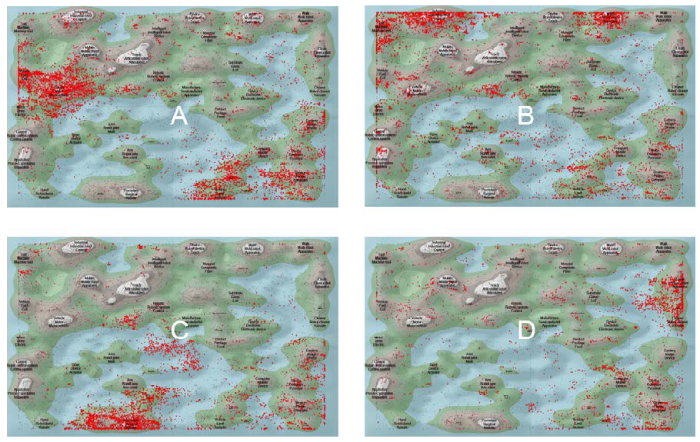
机器人技术专利组合地图
上述分析显示在多个研究领域出现了机器人技术的专利(图13)。
图13

按技术应用分类的机器人技术发明的专利分布情况
与某一特定技术相关的发明在专利组合地图中以红点标记(图14)。(A)应用于汽车行业的机器人技术的专利。(B)应用于制造业的机器人技术的专利的分布情况。(C)可用于医疗设备的专利。(D)应用于各种电子产品的机器人专利。总而言之,有关机器人的设备、传感和软件等方面的专利分布非常广泛。
图14
机器人技术专利家族排名前1 000的研究机构所属的前10个国家/地区
分析显示,机器人技术专利家族数量排名前1 000的机构中有524家来自中国(图15)。
图15

图15
机器人技术专利家族排名前1 000的研究机构所属的前10大国家/地区
来源:Derwent Innovation/DWPI专利家族,2007–2016年。
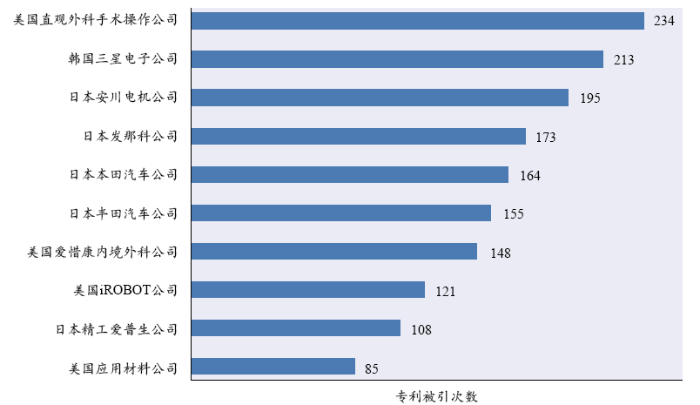
拥有引用次数全球排名前10%的机器人专利家族的 10强企业
基于被其他专利引用的次数或被专利审查员认可的引用次数,也可以对专利进行引证计量分析。专利的被引次数可以作为衡量其影响力的指标。如图16分析所示,许多医疗领域和汽车领域的公司都拥有大量具有影响力的专利。
图16
各国拥有专利的机构分布情况
下述分析根据机器人技术的专利家族数量确定了排名前1 000的企业,并评估了这些专利在各个国家/地区的分布情况。
在美国,前5家机构的机器人技术专利家族数量约占总量的29%。这5大机构分别是直观外科手术操作公司(Intuitive Surgical Operation)、爱惜康内镜外科公司(Ethicon Endo-Surgery)、iRobot公司、应用材料公司和波音公司。美国市场的突出特点是医疗领域的外科手术机器人领域有很多专利,并且该领域的公司排名很高,包括 Google、通用汽车、IBM、Raytheon和通用电气等IT企业、汽车和国防工业企业,它们正在积极推动机器人的技术创新。
在中国,前5家机构的机器人技术专利家族数量约占总量的34%。中国的显著特点是这些机构中包括很多大学和国有研究所,如国家电网、哈尔滨工业大学、上海大学、沈阳自动化研究所以及鸿海集团。尽管中国拥有大量与机器人技术相关的专利,但企业拥有的专利数量相对较少。不过,如果研究机构和大学拥有的机器人专利开始向企业转移,将在较短时间内对机器人行业产生重大影响。
在日本,前5家企业的机器人技术专利家族数量约占总量的12%。这5家企业分别是日本精工、丰田、安川、本田、发那科。许多公司都在积极申请专利。诸多不同行业的企业都在推动相关技术的创新,而整个国家的工业正在随着机器人技术的创新而进步。由于公司是优质专利的主要持有者,因此创新成果更有可能得到实际应用。
在韩国,前5家机构的机器人技术专利家族数量约占总量的47%。这意味着少数几家企业在韩国掌握了大量专利。这5家企业分别是三星电子、LG电子、电子与电信研究院(ETRI)、现代重工和现代汽车。中小企业拥有的发明专利相对较少。KAIST、KIST、汉阳大学和其他国立研究机构也在积极申请机器人技术相关的专利。
结语和解读
机器人技术的创新和发展正在诸多领域兴起。从既有生产系统的自动化开始,机器人技术正通过智能机器人的开发逐步渗透人类生活。如上述研究和专利形态分析所示,在很多国家/地区和研究机构,机器人技术是增长最快的研究领域之一。然而,在以战略方式加快机器人技术发展的同时,仍存在一些需要进一步考虑的挑战和问题。
聚焦创新研究领域,引领机器人技术发展
尽管很多机构正在进行研究并希望成为世界顶级创新组织,但其仍然缺乏具有足够影响力、能引领研究领域的创新研究成果。在引领创新方面,研究质量比产出数量更加重要。机器人技术是一个多学科领域,利用其他技术不断推动创新至关重要。比如,先进制造、人工智能和信息通信技术(ICT)正被积极整合到机器人技术领域。因此,需要在战略性研发投资的基础上努力创造先进研究成果,引领机器人技术的下一代创新。
研究界与商业界紧密合作
高校或研究机构是一个国家创新的核心源泉。产业界(尤其是中小企业)应当考虑与研究机构紧密合作以吸收创新理念,并共同合作研发机器人技术。研究界正在创造大量研究和发明,但在许多国家/地区,这些知识向商业领域的转移仍然有限。此外,研究人员还需要接近产业界,了解机器人技术发展面临的挑战。解决这些问题有助于达成更佳的研究方向。
确定研究和创新的战略方向
在美国有30%~40%的专利申请由于各种原因(包括存在现有技术)被驳回。机器人技术研究在各个领域已经有悠久的历史,而且人们一直在进行不同领域的新研究。创新投资始终与风险为伴,研究人员必须小心谨慎避免犯重复研发的错误。因此,研究人员和企业需要研究全球研发情况以了解已经完成的工作成果,以及值得追求的空白研究领域。
实施多学科环境,将各种创新想法融入机器人技术
随着人工智能技术的进步,机器人对技术的要求日益多样化,如需要软件工程、多媒体技术、机械工程、医疗技术,以及医疗保健、交通运输和安全等不同领域的背景知识。随着机器人技术领域的研究和发明的成熟,机器人技术创新的下一个阶段是对多个机器人无缝集成技术的需求。鉴于系统集成的复杂性,需要大量的数据处理、通信、建模和仿真,因此,拥有一个强大的研发战略,整合各类技术,多个研究团队协同行动是引领机器人技术研发的关键成功因素。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}