
科学观察, 2016, 11(2): 33-45

 , ,
, ,
Cite this article:
Yan Yafei , Guo Wenjiao , Jia Ping . Patent Technology Analysis of Medical Robots . 科学观察 [J], 2016, 11(2): 33-45 doi:10.15978/J.CNKI.1673-5668.201602004
摘要:
随着电子技术、传感器技术、计算机视觉技术以及信息处理技术的飞速发展,医用机器人的研究和应用取得了长足进展,已经成为智能机器人一个重要的发展分支。该文以 Derwent Innovations Index(DII)数据库为数据源,对全球医用机器人领域相关技术专利进行了统计分析,揭示了该领域专利技术的研发和竞争态势。
关键词:
医用机器人
;
专利申请
;
技术分析
;
IPC
;
专利地图
Key words:
medical robot
;
patent application
;
technical analysis
;
IPC
;
patent map
1 引言
近年来,在计算机技术、微创手术技术及医学影像学等多学科发展的共同推动下,医用机器人的研究和应用得到了很大发展。微创手术机器人具有定位精确、操控灵活、手术精细、分辨率高、防抖动及患者的舒适度高等多方面优势,被广泛应用在眼科、神经外科、心胸外科、肠胃外科和泌尿外科等微创手术领域中[1]。血管介入手术机器人以其稳定、精确及避免医生受到X射线辐射等优点,近些年常被用在辅助医生实现远程手术过程中[2]。康复机器人能够为患者提供规律性的运动技能恢复训练和神经感知训练,从而提高他们的独立生活能力,改善生活质量。医院服务机器人能够完成一些诸如抬起病人去厕所、为失禁病人换床单等繁重工作[3]。将磁共振向导手术机器人引入骨活检手术中,兼具无辐射、多参度成像、定位精确、分辨率高、可靠性好等特点[4]。由此可见医用机器人已经越来越频繁地应用于的医疗活动中,并且为医生和患者提供了高质量的服务。
本文基于相关数据库收录的专利信息,分析了医用机器人领域的全球及在华专利申请与研发情况,包括专利数量、专利技术构成、主要国家分布、主要专利权人以及技术布局等重要基础数据,供医用机器人相关领域的科研人员和决策人员参考,期望促进我国医用机器人的产业化发展。
2 数据获取与研究方法
本文分析数据来自德温特创新索引DII(Derwent Innovation Index)数据库,通过技术分解,利用相关领域的关键词构建了以“医用机器人”为主题的检索策略。将检索结果进行去噪,并结合人工判读确定了分析数据范围。数据检索日期为2015年11月10日,共检索到相关专利10 937项,分析工具采用Excel以及汤森路透公司数据挖掘工具Thomson Data Analyzer(TDA)等。
3 医用机器人全球专利态势分析
3.1 医用机器人全球专利数量变化趋势
1978年法国人Guittet J[5]在一次数据处理会议中发表了一篇关于医用机器人的文献,该文献表明医用机器人技术有助于减少手术风险,可以在恶劣条件下进行医疗干预进而提高患者生活质量,同时还支持医生的远程医疗,为病人提供移动设备或操作支持系统。在此之后,越来越多的机构参与到医用机器人相关技术研究中,该领域的研究文献及专利数量开始快速上涨。
图1展示了1979–2015年医用机器人相关专利数量的年度变化趋势。根据申请专利数量及发展趋势,可以将医用机器人的专利技术发展分为3个阶段。
第1阶段(1979–1990年),医用机器人技术萌芽期。该阶段申请专利数量少,专利增速较为缓慢,专利申请主要来自美国,专利技术主要集中在研究外科手术机器人及其运动、定位系统。这期间的研究成果主要有,美国ISS公司在1987年推出了NeumMate机器人系统,采用机械臂和立体定位架来完成神经外科立体定向手术中的导向定位;英国的皇家学院机器人技术中心在1989年利用改进的6自由度Puma机器人开展了前列腺切除手术,大大缩短了手术操作时间[6]。
第2阶段(1991–2000年),医用机器人技术成长期。该阶段专利申请数量开始明显上升,许多国家设立专项投资积极开展医用机器人方面的研究。除美国外,日本也开始相关专利申请。这一时期医用机器人已经在神经外科、整形外科、泌尿科、脊椎、耳鼻喉、眼科以及腹腔镜等众多领域得到应用,同时康复机器人、医院服务机器人也展现了其重要的作用。这一时期的技术热点集中在图像信息系统、高精度定位系统以及远程控制等方面。主要研究成果有:美国摩星(Computer Motion)公司于1994年推出了第一种能够用于微创手术的医用机器人产品伊索(Aesop)机器人,Aesop具有7个自由度,能够模仿人类手臂的姿态和功能,有效辅助医生抓持、操作内窥镜设备,在心脏、胸外、脊柱等多种外科领域有广泛应用;1995年,宙斯(Zeus)系统实现了医生远距离控制终端机器人进行精细的手术操作和稳定的器械抓持等工作,Zeus系统采用纯信号方式实现医生操纵台对机器臂的控制,在传输距离上不受视频延迟的影响;1997年,中国研制了基于Puma 262的脑外科机器人辅助定位系统。
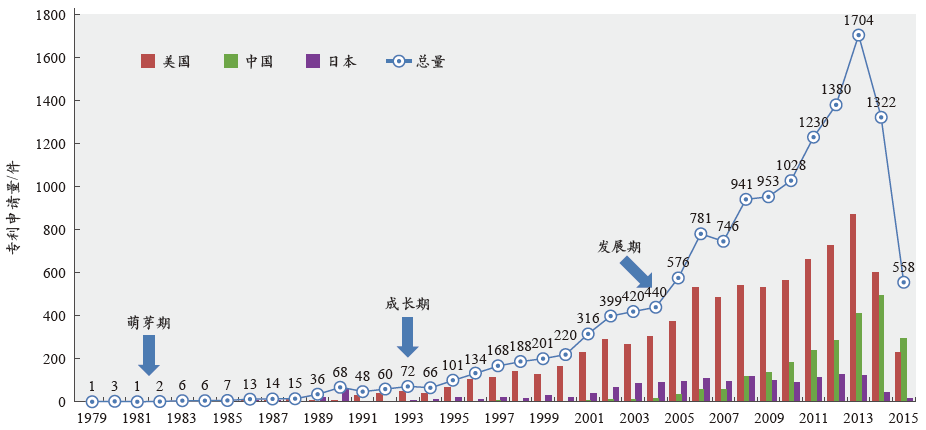
第3阶段(2000至今),医用机器人技术快速发展时期。专利申请数量飞速增长,中国开始有相关专利申请且发展迅速,后期专利申请量已经超过日本,紧追美国。这个时期的研究主要侧重于提高医用机器人操作精度及运动控制灵活度,缩小外形尺寸,提高柔韧性,提高用药精准度等方面。医用机器人的应用也拓展到了医疗服务的多个领域。主要成果有:以色列Mazor Robotics Ltd公司推出了可安装在骨骼上的小型并联脊柱外科机器人SpineAssist;北京航空航天大学与北京积水潭医院研制了6自由度小型骨科手术机器人;香港中文大学工程学院机械与自动化工程学系研发了靶向给药机器人[7]。
3.2 医用机器人全球专利技术构成分析
对医用机器人领域相关专利进行筛选与分类,并按申请量排序,关注度由高到低大致可分为3个梯度:第1梯队包含的A61B、B25J和A61F技术专利申请占绝对优势;第2梯队包含的A61H、A61M也占有较大比例;G05B、G06K、G06F属于第3梯队。
为进一步全面了解医用机器人技术发展,表1给出了专利申请量前20的主要技术分布(IPC大组),可以看出,医用机器人领域的专利技术主要集中在外科器械、装置及方法,定位仪器,目视仪器,诊断测量,程序控制机械手,能量传输外科器械,可植入血管的支架,探针,放射诊断仪器等多个方面。
3.3 医用机器人全球专利国家/地区分布
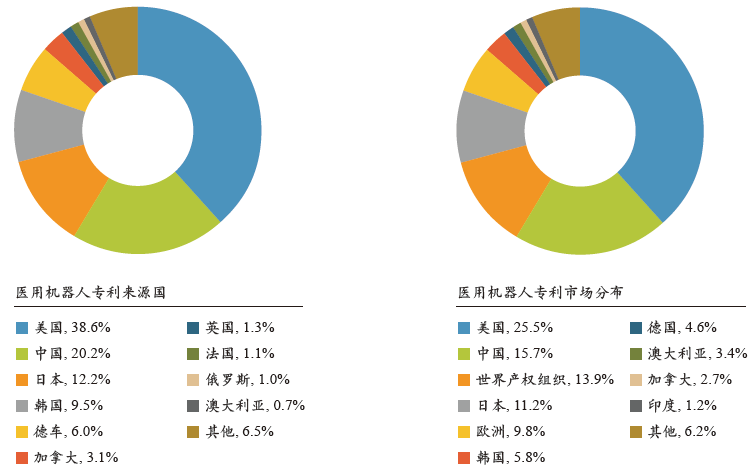
全球有数十个国家在医用机器人领域进行了专利申请,北美洲的美国和亚洲的日本、中国及韩国专利申请数量居多。专利申请排名前10位的国家依次为:美国、中国、日本、韩国、德国、加拿大、英国、法国、俄罗斯和澳大利亚(图2)。其中美国在该领域的研究起步较早,技术基础较为雄厚,申请专利4 321件,占该领域专利总量的38.6%,排名第1;其次是中国申请专利2 264件,占比20.2%。日本和韩国各自申请专利1 362件和1 062件,分别排在第3、4位。单从专利数量上看美国具有很强的研究实力,引领医用机器人领域的技术发展,中国在该领域属于后起之秀,研发与应用能力尚有差距。
对医用机器人专利技术市场布局进行统计分析,美国、中国、日本、欧洲和韩国是医用机器人的主要市场。从技术的流向来看,美国、中国、日本和韩国也是该领域主要的技术输出国。
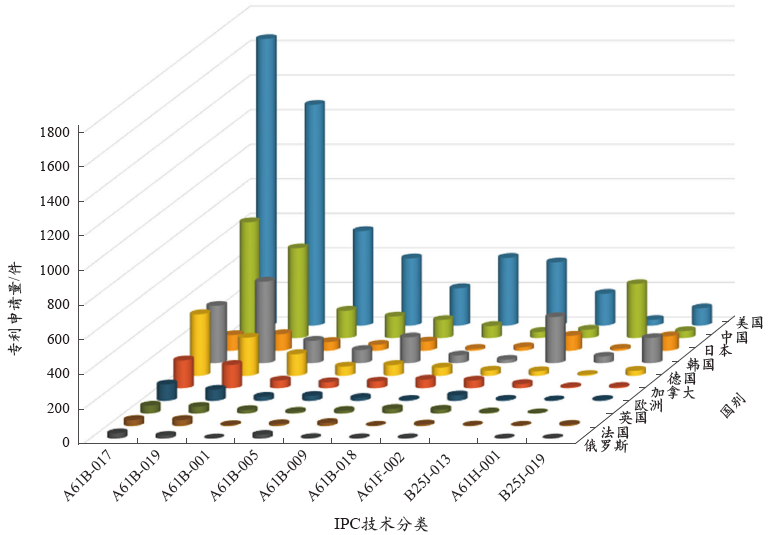
图3给出了专利申请量前10的优先权国家的主要技术构成情况。可以看出,这些国家的专利主要技术构成基本相似,但侧重点有所不同:美国侧重于A61B-017、A61B-19、A61B-001、A61B-005、A61B-018和A61F-002方面的技术研发;中国侧重在A61B-017、A61B-19和A61H-001方面进行技术研发;日本侧重于在A61B-017、A61B-19、B25J-013和B25J-019方面进行技术研发;韩国侧重于在A61B-017、A61B-19和B25J-013方面进行技术研发。
表1
医用机器人主要技术列表
3.4 医用机器人全球主要专利权人分析
3.4.1 专利权人集中度
通过分析专利申请人集中度可以掌握技术的垄断程度(见图4)。医用机器人相关专利申请机构中,申请量位居前10的机构的专利输出量占全球申请总量的17.7%,排名前30的机构的专利输出量占全球申请总量的28.2%,前100位机构的专利输出量占全球申请总量的42.3%。专利申请量前10机构中,位列第10的皇家飞利浦电子有限公司(74项)与排名第1的直觉外科公司(550项)相比,专利数量有一定的差距(见表2)。可见医用机器人领域中少数公司掌握着关键技术,专利数量远超其他机构,有一定的技术垄断倾向。
3.4.2 专利权人申请量
全球有4 000余家机构在医用机器人相关领域进行了专利申请,排名前20的机构主要来自美国、日本、韩国、中国、德国和芬兰,其中企业17家,研究机构3家。来自美国的5家机构包括:医用机器人制造商直觉外科公司(第1)、外科手术器械的研发制造公司爱惜康内镜外科公司(第2)、医疗器械研发公司汉森医疗(第4)、柯惠医疗公司(第11)和亦达远程医疗公司(第15),均为医疗机构。来自日本的奥林巴斯公司(第8)主要侧重内窥镜内手术器械技术方面的研究。来自中国的4家机构均为高校,说明相比其他国家,中国医用机器人的研究主要集中在高校,距产业化还有一段距离。
医用机器人领域专利申请活动活跃期在20年以上的机构有8家,包括专业医疗器械机构(直觉外科公司、爱惜康内经外科公司、卡尔史托斯公司),综合类研发机构(皇家飞利浦电子股份有限公司、西门子公司、奥林巴斯公司、索尼公司)及国家军事研发机构(德国宇航中心)。从研究机构的专利申请活跃度来看,三星电子集团和柯惠医疗公司长期坚持在医用机器人领域的研发投入,近5年申请量占比均超过65%。上海交通大学和哈尔滨工业大学在该领域的起步较晚,但是专利申请量增速较快,近5年申请量占比均超过了75%。
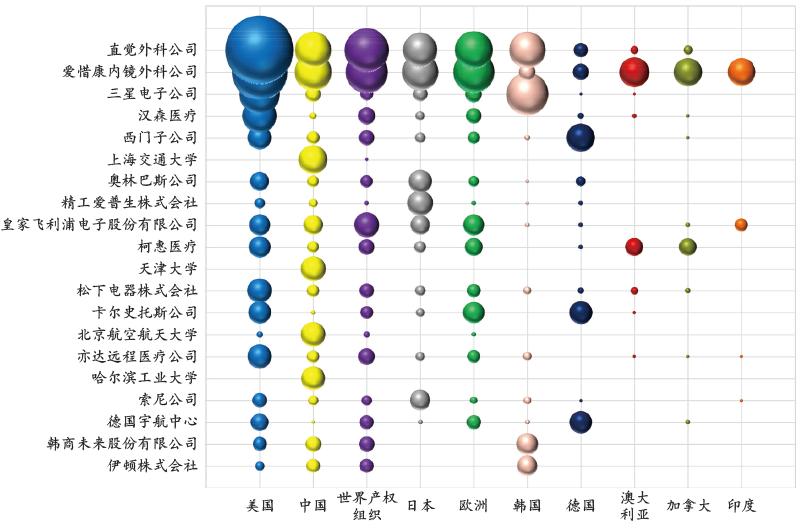
3.4.3 专利权人技术市场布局
全球专利申请量前20机构中,美国机构的全球市场布局意识最强,其次是日本和韩国,中国机构在这方面的意识较为薄弱。中国是医用机器人领域重要市场,前20机构均在中国进行了专利技术布局。除北京航空航天大学外,中国其他机构均未在国外市场申请专利保护。国外医用机器人研发机构则纷纷将美国、日本和欧洲作为医用机器人的重要市场(见图5)。
作为全球领先的外科手术机器人公司,直觉外科公司除了在中国、日本和欧洲进行专利布局外,还注重在韩国的专利申请,上述地区是该公司的主要目标市场。爱惜康内镜外科公司除了在中国、日本和欧洲申请专利外,还重视澳大利亚、加拿大和印度的医用机器人市场。三星电子公司非常重视美国市场,其次是中国、日本和欧洲市场。皇家飞利浦电子有限公司在美国、中国、日本和欧洲的专利布局数量相当,可见飞利浦公司侧重于在一些主要国家进行全面均衡的技术布局。中国机构几乎只关注本国的市场发展,在其他地区的专利布局非常少,只有北京航空航天大学在美国和欧洲有零星的专利申请。
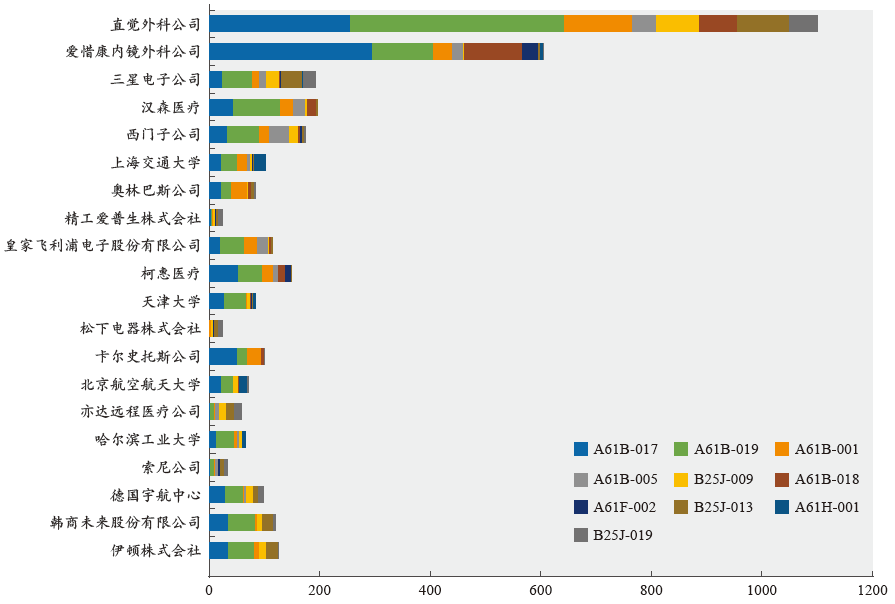
3.4.4 主要专利权人的专利技术
全球前20机构的医用机器人技术研究重点领域集中在外科器械、手术器械定位、机械手、内窥镜手术仪器、植入血管中的滤器、康复仪器以及放射用设备等方面(见图6)。其中各机构均在外科器械及其定位辅助装置等领域申请了相关专利。此外,各机构也在不同的技术方向有所侧重。直觉外科公司在内窥镜技术方面进行了专利布局,但是并未涉及康复器械相关领域的研究。爱惜康内镜外科公司在辐照相关外科器械方面进行了技术布局,西门子公司侧重于在电磁探测方面布局专利技术,上海交通大学侧重于在康复器械方面进行专利技术布局,奥林巴斯公司侧重于在内窥镜领域进行专利布局,柯惠医疗侧重于在机械手的监控方面布局专利。
3.4.5 主要专利权人合作关系
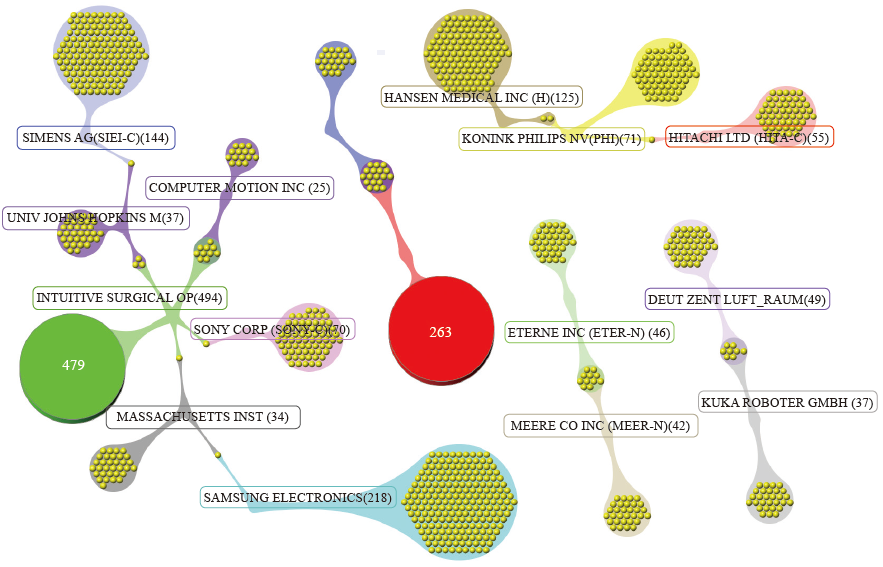
医用机器人研究领域内的各个机构在加快发展自身研发实力、扩大技术保护范围的同时也在寻求合适的合作伙伴,力求在较短的时间内发挥利用双方的优势,补充各自的短板,联合起来进行技术研发。该领域内多个研究机构间进行了专利申请合作,产生了大量的技术成果。对医用机器人领域申请量排名前60位的机构进行合作分析,得到合作关系图(见图7)。
(1)直觉外科公司作为行业内专利申请最多的机构,在技术研发过程中非常重视同其他机构间的合作。在与约翰霍普金斯大学和麻省理工学院的合作中,借助高校雄厚的科研实力和人才队伍开展先进技术的研究,并迅速将研究成果转化为产品推向市场。通过与摩星公司及索尼公司的合作,可以实现技术上的优势互补,快速拓展技术布局的范围。直觉外科公司与其他机构联合申请的专利主要面向美国和韩国等市场,主要合作研究主题如下。
与约翰霍普金斯大学合作了2项专利(US 2009036902-A1、US 2007021738-A1),主要研究了机器人微创手术方法和腹腔镜超声机器人手术系统。与麻省理工学院合作申请一项PCT专利(WO 9950721-A1),该专利在美国和欧洲进行了技术市场布局,主要设计了远程手术的机械设备。
与摩星公司合作申请了10项专利,其中PCT专利4项。主要技术领域是微创冠状动脉搭桥医用机器人系统(US 2005038416-A1)、医用机器人运动控制系统(US 2005043719-A1)、内窥镜冠状动脉搭桥等侵入性手术的医用机器人系统(US 2004186345-A)、医用机器人系统仲裁员启用控制使用输入设备(EP 1290982-A2)、执行外科手术与孔径接收手术的手臂机器人系统(EP 1254642-A1)、手术室控制系统(EP 1068837-A1)、机器缝合系统(WO 200059384-A1)、使用机械手臂微创心脏手术缝合方法(WO 9729690-A1)、语音命令接口控制的自动机器人内窥镜系统(WO 9609587-A1)、控制手术器械位置的机器人系统(WO 9403113-A1)。
与索尼公司合作申请了1项专利(US 2002072736-A1),研究了冠状动脉旁路移植血管和消化外科手术机器人,该专利主要布局于美国和韩国市场。
(2)西门子公司和三星电子公司作为电子仪器领域的常青树,在医用机器人领域也注重与高校的研究合作。
西门子公司和约翰霍普金斯大学合作有一项专利(US 2012289821-A1),该专利主要研究了用于图像引导手术的医学成像系统。
三星电子公司和麻省理工学院合作一项专利(EP 2666434-A1),该专利在美国、韩国、日本、中国和欧洲进行了技术布局,主要研究了应用在侵入性手术病人的机械臂装置机器驱动单元。
(3)各医疗器械公司之间、医疗器械公司与机器人企业间也有技术合作。
皇家飞利浦公司和汉森医疗公司合作申请了一项PCT专利(WO 2009023801-A1),主要研究远程机器人手术系统。爱惜康内镜外科公司与DEVICOR MEDICAL公司合作申请了18项专利,这些专利主要是围绕手术机器人的内窥镜手术活检装置、活检等进行的相关研究。
德国库卡机器人公司和德国宇航中心合作了8项专利(DE 102008041867-A1、DE 102008041709-A1、DE 102008041602-A1、WO 2010017919-A1、WO 2009135835-A1、WO 2009095350-A1、WO 2009092701-A1、DE 102007055204-A1),主要研究用于医学领域的机器人模型参数方法、医用机器人上的医疗工具的使用控制及机械臂的控制装置等技术。
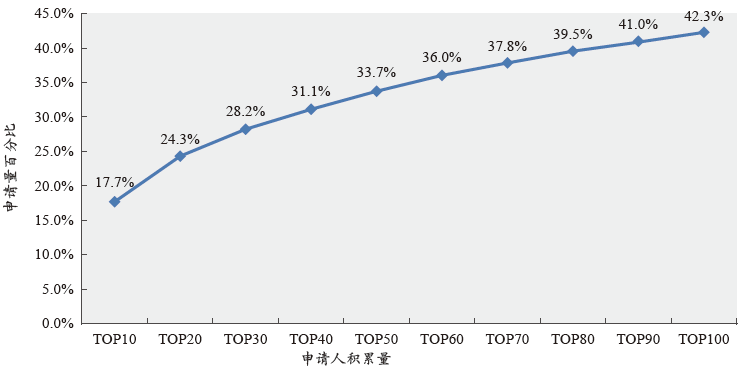
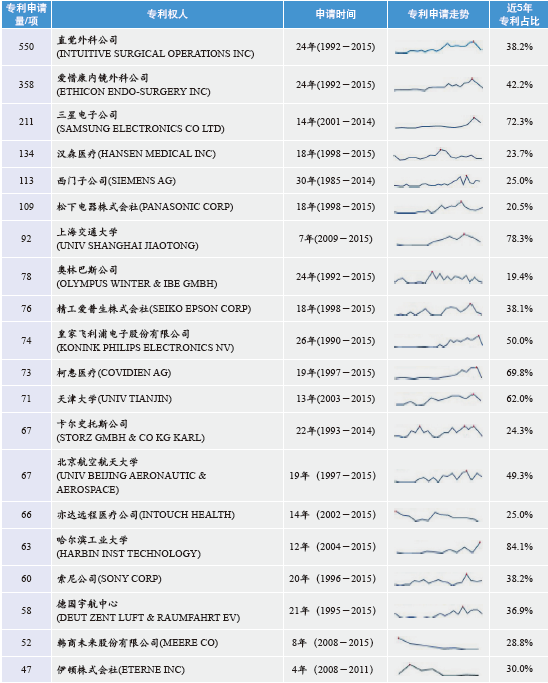
表2
全球医用机器人专利申请量前20位专利权人
4 医用机器人在华专利态势分析
4.1 在华专利申请机构分析
医用机器人技术在华专利申请前15机构中,国外机构有4个,国内机构有13个(见表3)。其中上海交通大学申请专利92项,排名第1位。其次是美国的直观外科手术公司,在华申请专利85项,排名第2位。天津大学排名第3位,申请专利71项。从机构的性质来看,国外在华专利申请机构均为企业,国内申请机构除了北京天智航技术有限公司和昆山市工业技术研究院有限责任公司属于企业性质外,其他均为高校和中国科学院研究所。从专利申请活动年限上来看,北京航空航天大学、天津大学和哈尔滨工业大学是国内较早开展医用机器人相关技术研究的机构。
表3
医用机器人在华专利申请前15机构
4.2 在华专利应用领域分析
医用机器人在华专利申请的主要应用领域有手术机器人、康复机器人、内窥镜机器人及诊疗机器人等(见表4)。其中上海交通大学侧重于在内窥镜机器人(12项)和康复机器人(18项)应用领域进行技术布局;天津大学侧重于手术机器人(35项)和CT机器人(1项)应用领域;哈尔滨工业大学侧重于手术机器人(19项)、内窥镜机器人(6项)和活检机器人(5项)应用领域;北京航空航天大学侧重于手术机器人(17项)和康复机器人(14项)应用领域。另外,中国计量学院、北京大学深圳医院、深圳市卫邦科技有限公司和深圳先进研究院在配药机器人应用领域展开了相关研究。南京航空航天大学、华南理工大学、深圳市易特科信息技术有限公司、重庆大学和沈阳新松机器人自动化有限公司在诊疗机器人应用领域申请了相关专利。广州大学和浙江大学在血管机器人领域申请了相关专利。
表4
医用机器人应用领域主要申请机构列表
4.3 在华专利主题分析
通过对医用机器人在华专利进行判读,可以归纳出各机构的技术研究主题。在华申请专利的国外机构中,直觉外科手术公司主要布局在手术转接器、显示系统、机械手支架、远程图解、弯曲套管操纵器、取向系统、主动控制系统、加持力控制系统、内窥镜等领域。伊西康内镜外科公司主要布局在外科器械、工具递送方法、力反馈系统、闭锁机构及触觉反馈装置等领域。韩商未来股份有限公司主要布局在夹持器、显示系统、控制方法、联结结构及手术从动系统等领域。伊顿株式会社主要布局在器械联结结构、移动控制/补偿方法、操作方法及图像处理装置等领域。
在华申请专利的国内研究机构中,上海交通大学主要布局在可穿戴上肢康复、床式下肢康复、微型电磁驱动器、微型钳位机构、六维力敏传感器、手术器械末端结构、腹腔微创、辅助控制系统、多自由度等领域。天津大学主要布局在手术剪刀、机构锁定装置、辅助操作手、机械手、力觉控制系统、持镜系统、辅助支架、针刺机械手、自动控制手术台、图像显示系统、柔性双驱机构等领域。北京航空航天大学主要布局在脑外科手术系统、骨科导航系统、无坐标空间定位方法、快速切换装置、推进机构、九自由度混联方法、被动/主动控制系统及自动缝合机构等领域。哈尔滨工业大学主要布局在骨科手术医疗系统、五自由度结构、微创手术仿真系统、柔性臂、内窥镜运动控制系统、微型、人机交互控制系统、多自由度柔性系统、六维力矩传感器、双平面并联机构及定位执行机构等领域。哈尔滨工程大学主要布局在三自由度力反馈系统、穿刺孔定位方法、外骨骼助行康复、微操作手指及上肢康复等领域。中科院深圳先进技术研究院主要布局在控制方法和系统、机械手爪、手术导航系统、及手术辅助系统等领域。天智航技术有限公司主要布局在骨科手术导航装置、定位图像标记拾取方法、器械固定装置、定位标志点识别方法、精度检测装置及导针定位导航装置等领域。
5 结论
本文在调研医用机器人全球及在华专利申请的基础上,对医用机器人的专利发展态势、重点技术及重要研发机构进行了分析。医用机器人目前正处于快速发展阶段,很多国家和地区对其高度关注,推动了相关科学研究和产业化发展持续升温。主要分析结果如下。
(1)作为医用机器人主要市场的美国、中国、日本和韩国也是主要的技术输出国。美国参与医用机器人领域技术研究的时间较早,专利申请数量一直遥遥领先。中国起步较晚,但是发展速度很快,近些年的专利数量已经超过日本,稳居第2位。
(2)医用机器人全球专利申请前20机构中,除了来自中国的3所高校外,其他国家的研究机构均为企业。美国、日本及韩国等国的研究机构非常重视全球的技术布局,中国机构多数仅在国内进行了专利申请,全球市场意识较为薄弱。医用机器人全球专利申请前60机构非常注重技术研发合作,共同产出了许多成果。
(3)医用机器人在华专利申请数量高于10项的机构中,国外机构4个,国内机构14个。美国直观外科手术公司在华申请专利85项,位居第2位。国内机构除北京天智航技术有限公司和昆山市工业技术有限责任公司属于企业性质外,其他均为高校或中国科学院研究所。
(4)医用机器人在华专利技术主要集中在手术器械、被动锻炼器械、内窥镜等目视仪器、机械手控制系统等领域。其应用主要集中在手术机器人、康复机器人和内窥镜机器人等领域。
(5)在华申请的国外机构技术布局主要集中在手术辅助器械、图像处理及显示系统、控制系统、内窥镜及力反馈系统等方面。
通过对比分析结果可以看出,我国虽然在医用机器人领域申请了大量专利,但是还存在着一些不足。国内的医用机器人领域主要研发机构集中在高校和中科院研究所,企业申请专利数量较少,国内医用机器人领域的产业化发展比较缓慢。国内机构倾向于只在国内申请专利,全球市场意识较为薄弱。我国政府应继续加大对医用机器人的支持力度,加强国外市场布局和保护力度,设立更多应用导向性项目,加强高校、研究所与企业的合作,通过产学研合作促进我国医用机器人技术基础研究与产业化开发的有机衔接,实现我国医用机器人的跨越式发展。
The authors have declared that no competing interests exist.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}