
科学观察, 2016, 11(2): 12-23

Cite this article:
Chen Xiaoli . Patent Analysis on International Industrial Robot Research and Development Trend . 科学观察 [J], 2016, 11(2): 12-23 doi:10.15978/J.CNKI.1673-5668.201602002
摘要:
随着工业机器人应用领域的不断扩大以及现代工业的快速发展,人们对工业机器人性能的要求越来越高,以期进一步提高生产效率和产品质量,因此高速、高精度、智能和模块化成为目前工业机器人发展的主要趋势。近年来全球工业机器人相关专利申请数量持续快速增长。该文基于汤森路透公司的Derwent Innovation Index数据库,利用TDA、Excel等分析工具,对全球工业机器人相关专利进行了分析,揭示了全球工业机器人相关专利技术的研发和竞争态势。
关键词:
工业机器人
;
专利分析
;
研发态势
Key words:
industrial robot
;
patent analysis
;
research and development trend
1 引言
工业机器人是面向工业领域的多关节机械手或多自由度机器人[1]。工业机器人综合了计算机、控制论、信息和传感技术、人工智能、仿生学等多学科,由操作机、控制器、伺服驱动系统和检测传感装置构成,是先进制造技术领域不可缺少的自动化设备。工业机器人的产品分类方式多种多样[2]。按臂部运动形式的不同,工业机器人可以分为4种:直角坐标型、圆柱坐标型、球坐标型和关节型。按照应用领域的不同工业机器人可以分为:弧焊机器人、电焊机器人、喷涂机器人、码垛机器人、搬运机器人、装配机器人及检测机器人等。
工业机器人产业的发展越来越受到世界各国的高度关注,主要经济体纷纷将发展机器人产业上升为国家战略,并以此作为保持和重获制造业竞争优势的重要手段。根据国际机器人联合会(IFR)公布的全球工业机器人的销量数据[3]来看,工业机器人产业在经历了2009年的全球经济衰退后,从2010年开始逐渐复苏。2014年全球工业机器人销量为22.50万台,同比增速为26.31%,无论是销量还是增速均创历史新高。其中汽车行业和电子行业是工业机器人销售量最高的两个行业,焊接、搬运和装配是工业机器人应用最多的三大应用功能。
全球机器人总销量的70%集中在中国、韩国、日本、美国和德国这5个国家,并且中国已成为全球第一大工业机器人市场[3]。2005年至2014年期间,中国工业机器人的销售量以年均25%左右的速度高速增长。2013年国际机器人联合会的统计数据显示,韩国的工业机器人密度全球最高,达到437台/万人,日本为323台/万人,德国为282台/万人,美国为152台/万人。然而,中国的工业机器人密度仅为30台/万人,远低于国际平均水平。
本文通过对工业机器人领域的专利进行分析,揭示工业机器人技术研发布局及全球市场竞争态势。专利数据检索自汤森路透 Derwent Innovations Index(DII)数据库和Thomson Innovation(TI)数据库,利用专利检索策略1(1 TS=("industr* (robot* or manipulat*)" or "automat* guid* veh*" or AGV or articul* (robot* or manipulat*) or SCARA or Delta (robot* or manipulat*) or cartesian* coordinat* (robot* or manipulat*) or "cylindr* coordinat* (robot* or manipulat*)" or weld* (robot* or manipulat*) or transfer* (robot* or manipulat*) or pallet* (robot* or manipulat*) or sort* (robot* or manipulat*) or stamp* (robot* or manipulat*) or assemb* (robot* or manipulat*) or pack* (robot* or manipulat*) or unpack* (robot* or manipulat*) or cut* (robot* or manipulat*) or grind* (robot* or manipulat*) or polish* (robot* or manipulat*) or paint* (robot* or manipulat*) or parallel* (robot* or manipulat*) or clean room (robot* or manipulat*))),共检索到46 482项专利文献(检索时间2015年10月)。专利数据分析工具包括汤森路透数据分析工具(Thomson Data Analyzer, TDA)、汤森路透创新专利分析平台(Thomson Innovation, TI)以及Excel等。
2 全球工业机器人专利技术分析
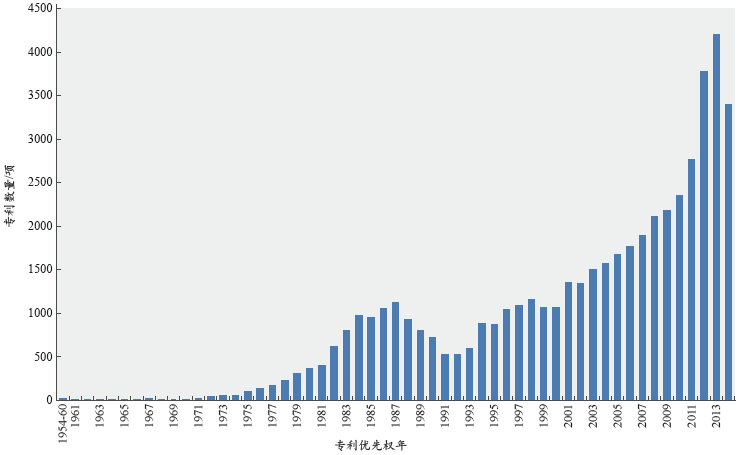
2.1 全球专利数量年度变化趋势
全球最早的工业机器人专利申请始于1954年(图1),该专利由美国人乔治德沃尔申请,专利名称为可编程的操作装置。基于这项专利,乔治德沃尔联合约瑟夫英格伯格在1959年生产出世界上第一台工业机器人“Unimation robots”[2]。1950至1960年代的机器人基本都属于“可编程的示教再现型机器人”[4],即通过示教编程存储作业程序的机器人。
1970年代至1980年代末期,专利数量飞快增长,并且出现了具有一定感觉功能和自适应离线编程能力的“知觉判断机器人”[4]。工业机器人“四大家族”:库卡、ABB、安川、FANUC公司分别在1974年、1976年、1978年和1979年开始了全球专利布局。
从1990年代至今,工业机器人的专利申请量迅猛增长。此阶段机器人带有多种传感器,能够将多种传感器所得到的信息进行融合,能够有效地适应环境变化,具有很强的自适应能力、学习能力和自治功能。
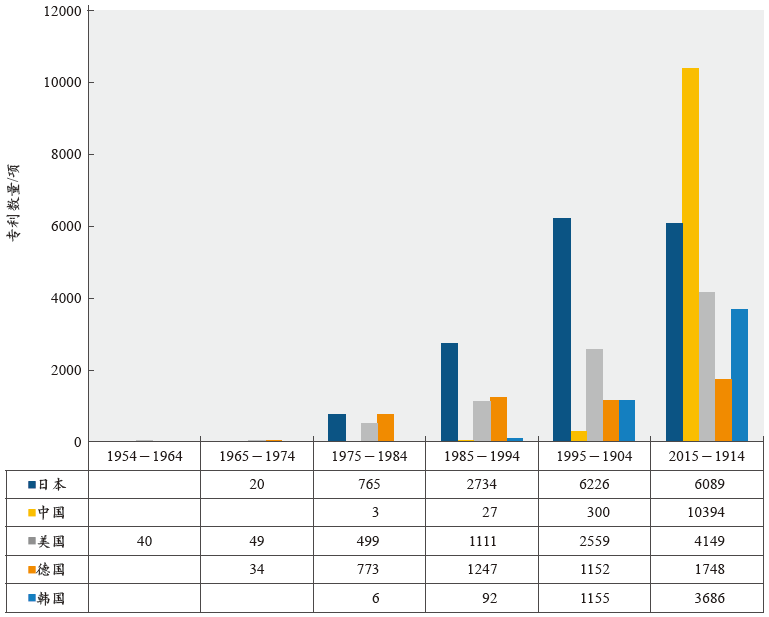
工业机器人专利申请量前5位国家中(图2),美国最早开始工业机器人的研发,其研发活动可追溯到1950年代早期。日本和德国对工业机器人的专利申请晚了将近10年,直到1960年代末期才出现工业机器人技术的专利申请。中国和韩国都是于1980年代早期进入该研究领域。
美国作为最早进入工业机器人领域的国家,在工业机器人领域的专利申请涨幅不大,主要原因是美国政府担忧工业机器人会造成失业率增加,一直以来并不鼓励工业机器人的生产和利用[5]。日本在战后劳动力日趋紧张的形势下,政府大力扶持工业机器人产业以提高日本制造的效率和质量[5],因此日本在1970年代末期超过美国成为工业机器人专利申请的第一大国。经过近40年的发展,日本企业基本占据了工业机器人的大部分市场,只有少数非日本的公司能在市场上有一席之地,如美国的Adept Technology公司、瑞士的Stäubli-Unimation公司、瑞典的ABB公司、德国的KUKA公司和意大利的Comau公司[2]。韩国和中国作为后起之秀,近10年来专利申请量增长迅猛,并且中国的专利申请量已超过日本位列第一位。
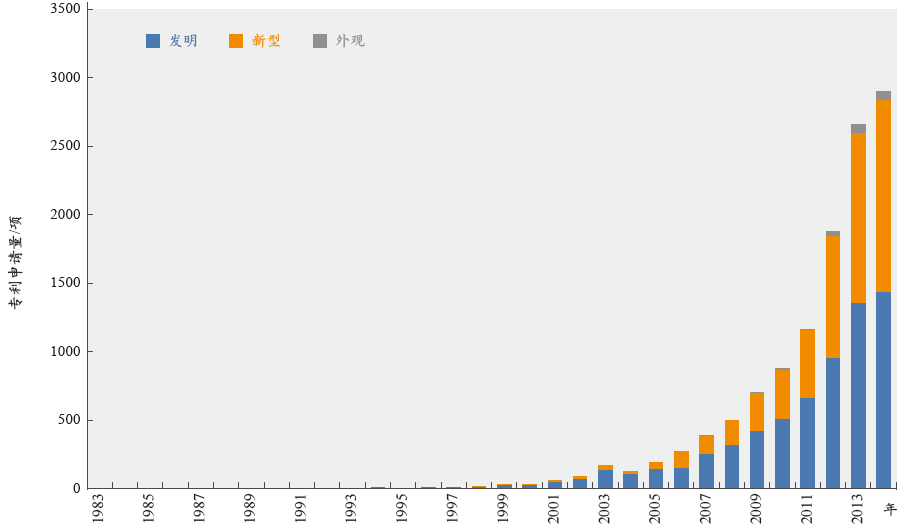
国内最早的工业机器人专利申请始于1983年(图3)。从此,中国对工业机器人攻关研发的序幕正式拉开。整个1980年代至1990年代,工业机器人的专利数量较少,一方面由于我国工业机器人的研发实力有限,另一方面在于我国科研机构和相关企业的专利保护意识薄弱。进入2000年后,我国制造业人口红利逐渐消失,在国家相关政策及重大项目的支持下,我国工业机器人的专利申请量有了飞速增长。
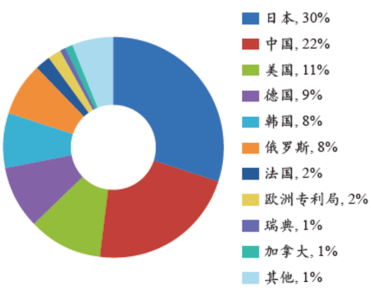
2.2 专利技术来源国和市场国
专利技术的来源国是指专利的最早优先权国家,这里我们假定所有专利的最早优先权国家都是本国。从专利技术的国家来源看(图4),日本的专利量位列第1,占总数的30%,中国和美国分别排在第2和第3位,分别占总数的22%和11%。东亚除日本和中国外,韩国的技术实力也相当雄厚。俄罗斯和韩国并列第5位。欧洲地区除了德国实力较强外,法国和瑞典也均进入专利申请的前10位国家。北美的加拿大以1%的占比排在第10位。
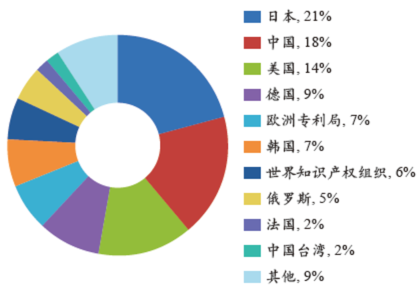
专利技术的市场国是指专利的同族专利申请国,通常同族专利簇涉及的申请国家均是该专利技术的市场布局国家。从专利技术的市场分布来看(图5),专利市场主要分布于日本、中国、美国、德国、欧洲专利局、韩国、世界知识产权组织、俄罗斯、法国、台湾等地区。这也体现了日、中、美、韩是工业机器人的主要市场。
2.3 专利申请量排名前20的申请人
全球约有2万多家机构活跃在工业机器人研发领域。专利申请量前20位申请人中大部分为企业(表1)。日本共有16家机构进入全球前20,另外4家分别为韩国2家、瑞典和德国各1家。日本整体实力雄厚,也是世界上工业机器人市场占有率最大的国家。
通过分析专利申请活跃期和新专利申请量,可以看出竞争机构对于某一技术的技术领先持续度和最新的技术发展态势。在工业机器人相关技术专利中,从排名前20位机构的专利申请活跃期和近5年专利申请量占总量的比例情况看,申请人的专利申请活跃期基本保持在20年以上,其中专利申请活跃期超过40年的申请人分别是瑞典ABB公司、日本欧地希机电、日本电装公司、日本日立和日本那智不二越。其中,最早开始申请的是日立公司,至今已有44年历史,但其专利申请高峰主要在上个世纪,近年来少有工业机器人的专利申请。
各专利申请人近5年的专利申请活跃度并不相同。近5年专利申请占比大于20%的机构主要有日本安川电机、瑞典ABB、韩国现代、日本欧地希机电、德国库卡、日本爱普生、日本川崎重工、日本神户钢铁。

表1
工业机器人领域全球前20位专利申请人

表2
工业机器人领域中国前20位专利申请人
我国在工业机器人领域专利申请的前20位专利申请人主要是高校和科研机构(表2),清华大学、哈尔滨工业大学和上海交通大学排在专利申请的前3位。企业仅有国家电网和沈阳新松机器人公司分别排在第5和第14位。国家电网的专利主要是针对工业机器人在电力行业的应用。沈阳新松机器人公司隶属中国科学院,生产多种工业机器人,是国内最大的工业机器人生产企业。
2.4 热点国际专利分类技术类型
按照国际专利技术分类(international patent classification, IPC),工业机器人相关技术专利申请所涉及的IPC技术类型主要集中在机械手、焊接、控制或调节系统、运输或贮存装置、半导体器件等方面。主要技术类型的中文释义见表3。
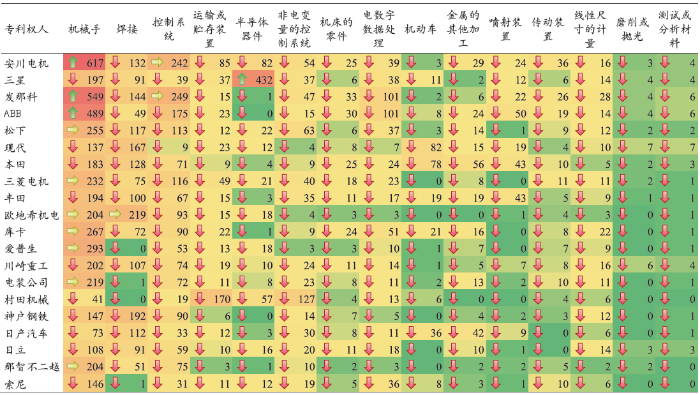
全球前20位工业机器人专利申请人的专利技术类型主要是机械手技术、焊接技术、控制系统、运输或贮存装置以及非电变量的控制系统领域(图6)。在机械手技术领域和控制系统领域,安川电机、发那科和ABB实力最强。焊接技术领域的前3强分别是欧地希机电、神户钢铁和韩国现代。运输或贮存装置和非电变量的控制系统领域均是村田机械实力最强。
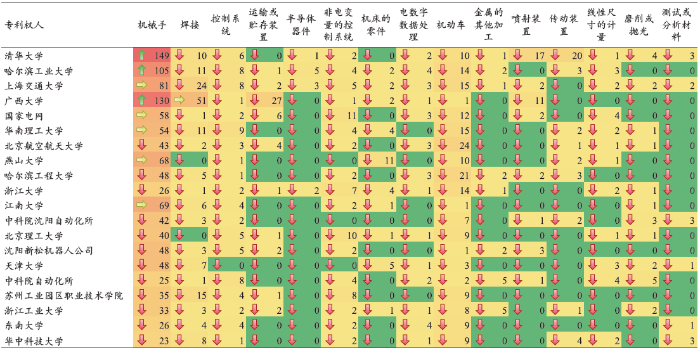
国内前20专利申请人技术类型分布中,在机械手技术领域,清华大学、广西大学和哈尔滨工业大学的实力位列前3位(图7)。广西大学还在焊接和运输或贮存装置领域实力最强。
表3
工业机器人专利主要技术类型(国际专利分类)
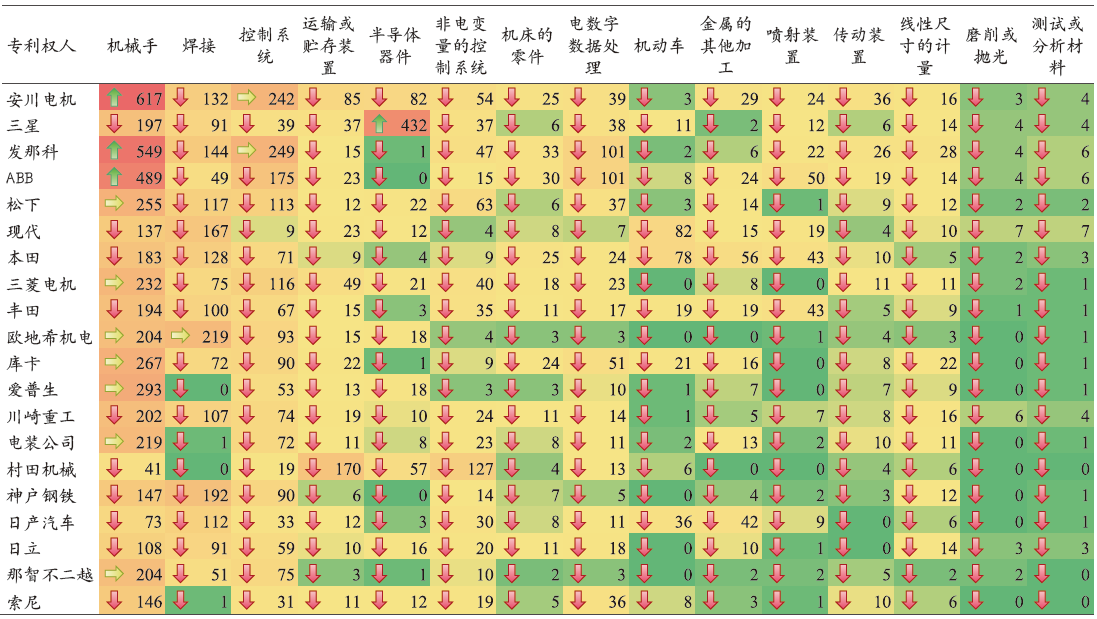
图6
世界排名前20位的专利申请人技术类型分布(国际专利分类)
注:图中单元格内红色表示大值,绿色表示小值,颜色的渐变随着值的大小确定。绿色向上、黄色向右、红色向下的箭头分别表示值区间为60%~100%,20%~60%,0%~20%。
注:图中单元格内红色表示大值,绿色表示小值,颜色的渐变随着值的大小确定。绿色向上、黄色向右、红色向下的箭头分别表示值区间为60%~100%,20%~60%,0%~20%。
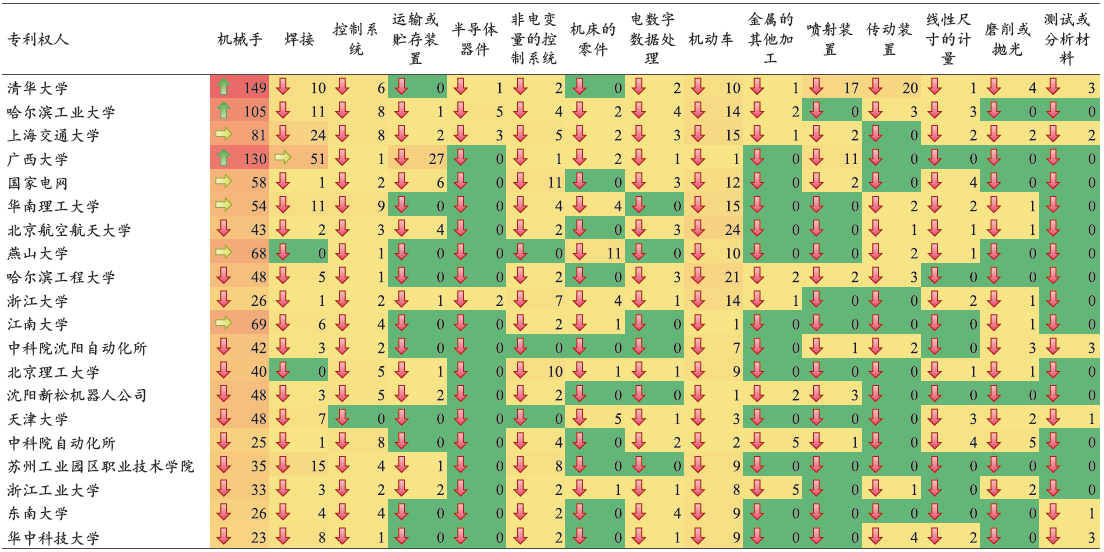
图7
国内排名前20位的专利申请人技术主题分布(国际专利分类)
注:图中单元格内红色表示大值,绿色表示小值,颜色的渐变随着值的大小确定。绿色向上、黄色向右、红色向下的箭头分别表示值区间为60%~100%,20%~60%,0%~20%。
注:图中单元格内红色表示大值,绿色表示小值,颜色的渐变随着值的大小确定。绿色向上、黄色向右、红色向下的箭头分别表示值区间为60%~100%,20%~60%,0%~20%。
2.5 工业机器人关键技术专利分析
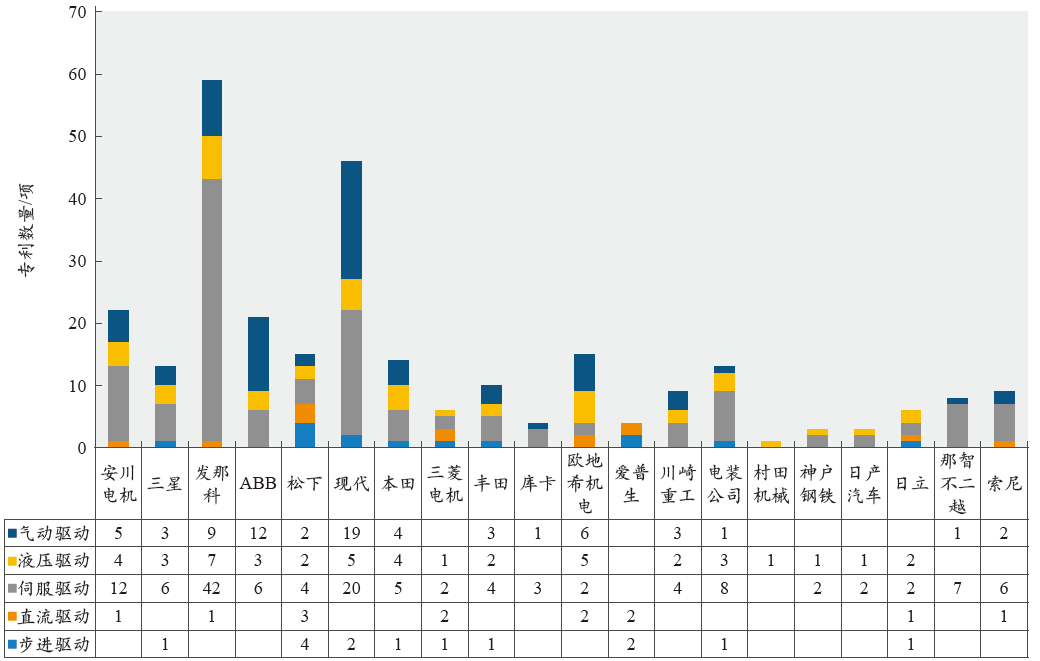
2.5.1 工业机器人的驱动类型
工业机器人的驱动器主要有步进电机、直流电机、伺服电机、液压驱动和气动驱动[5]。根据全球排名前20专利权人对各驱动器的专利申请量分布可以看到(图8),对气动驱动方式申请专利最多的是韩国现代,对液压驱动方式申请专利最多的是发那科,对伺服电机方式申请专利最多的3位申请人分别是发那科、韩国现代和安川电机,对直流电机方式和步进电机方式申请专利最多的是日本松下。
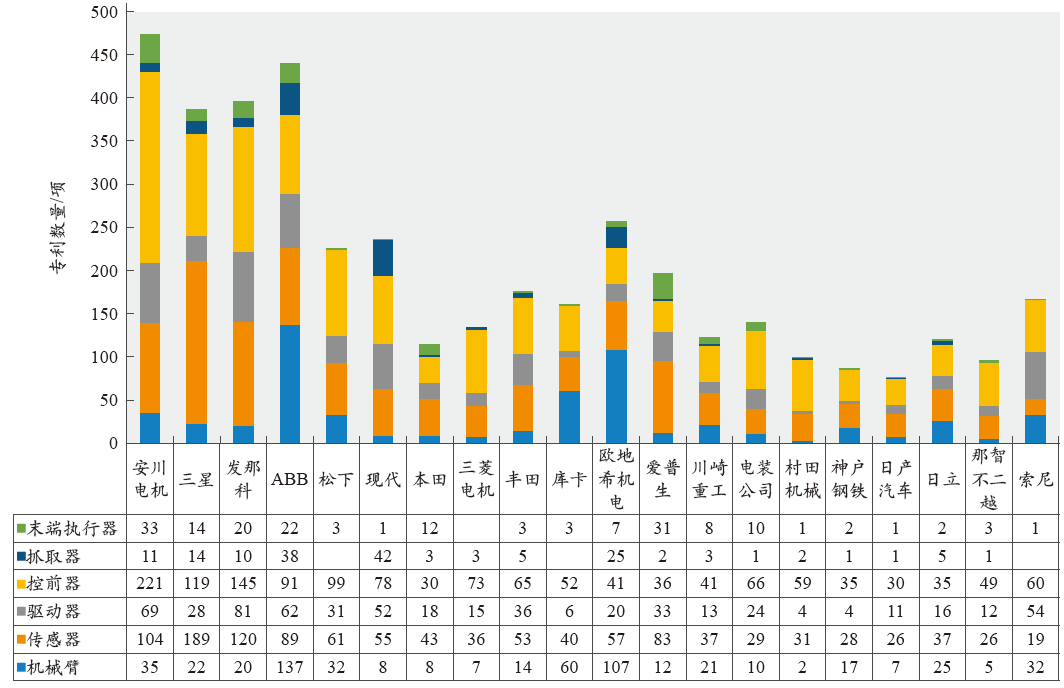
2.5.2 工业机器人的机构
工业机器人主要由机械臂、传感器、驱动器、控制器、抓取器、末端执行器等机构组成[5]。全球前20专利申请人中,对机械臂申请专利最多的是ABB(图9)。对传感器申请专利最多的是三星。对驱动器申请专利最多的是发那科。对控制器和末端执行器申请专利最多的是安川电机。对抓取器申请专利最多的是韩国现代。
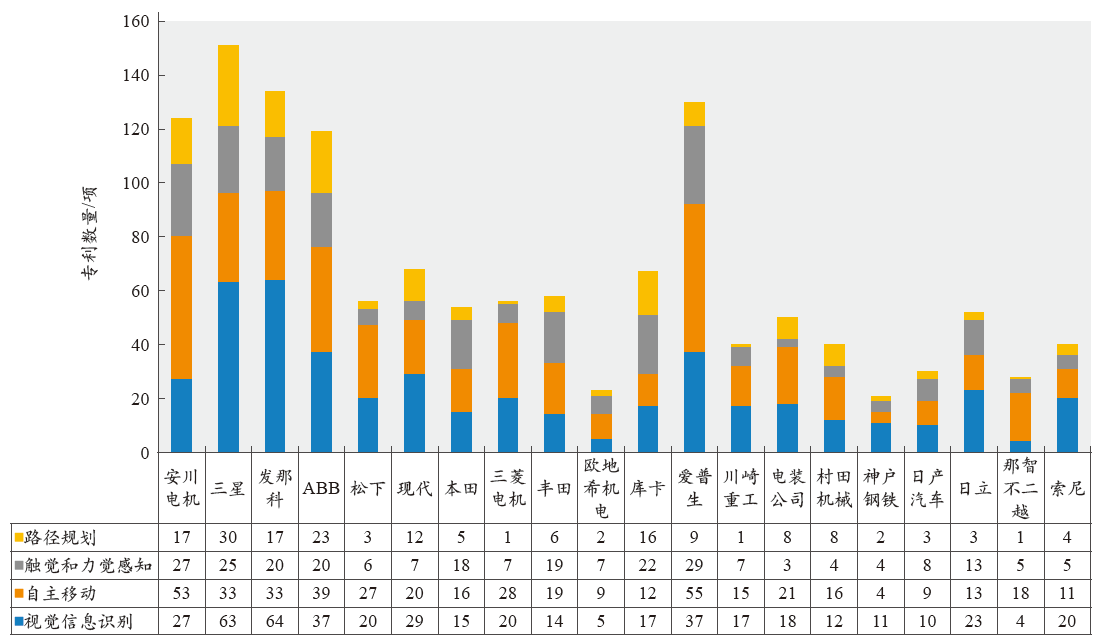
2.5.3 工业机器人的智能技术
工业机器人领域的智能技术主要有视觉信息识别、自主移动、触觉和力觉感知、路径规划[5]。全球前20专利申请人中,对视觉信息识别技术申请专利最多的是发那科(图10)。对自主移动技术、触觉和力觉感知技术申请专利最多的是爱普生。对路径规划申请专利最多的是三星。
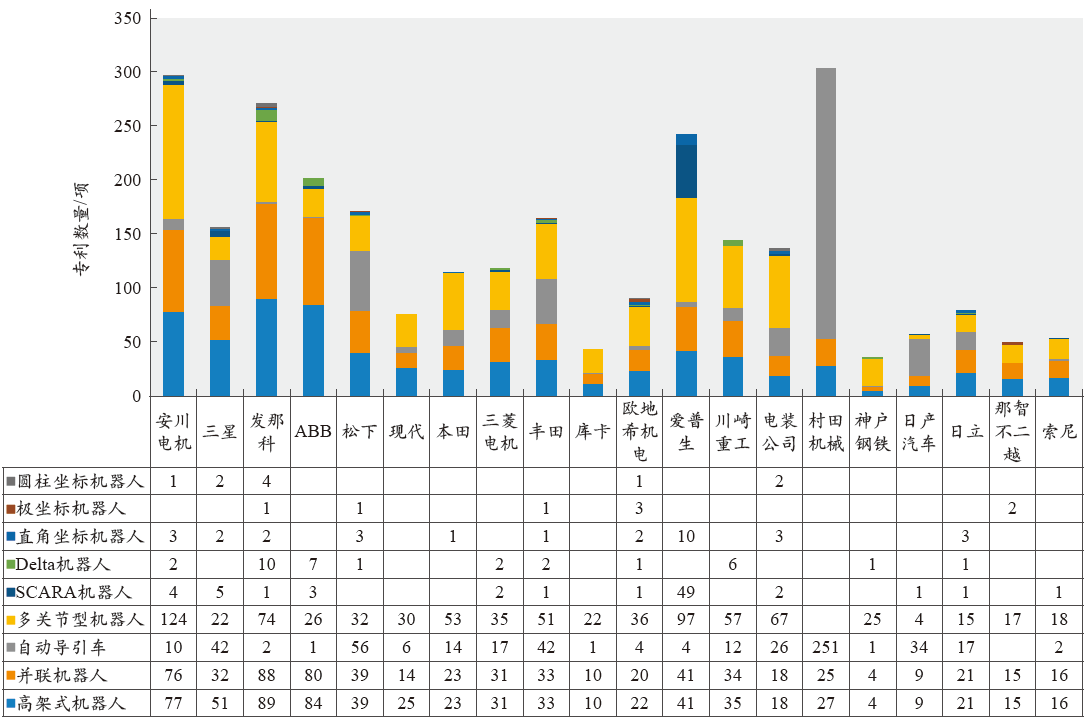
2.5.4 工业机器人类型
工业机器人可以分为高架式机器人、并联机器人、自动导引车、多关节型机器人、SCARA机器人、Delta机器人、直角坐标机器人、极坐标机器人、圆柱坐标机器人[5]。全球前20专利申请人中,对高架式机器人、并联机器人、Delta机器人、圆柱坐标机器人申请专利最多的是发那科(图11)。对自动导引车申请专利最多的是村田机械。对多关节型机器人申请专利最多的是安川电机。对SCARA机器人、直角坐标机器人申请专利最多的是爱普生。对极坐标机器人申请专利最多的是欧地希机电。
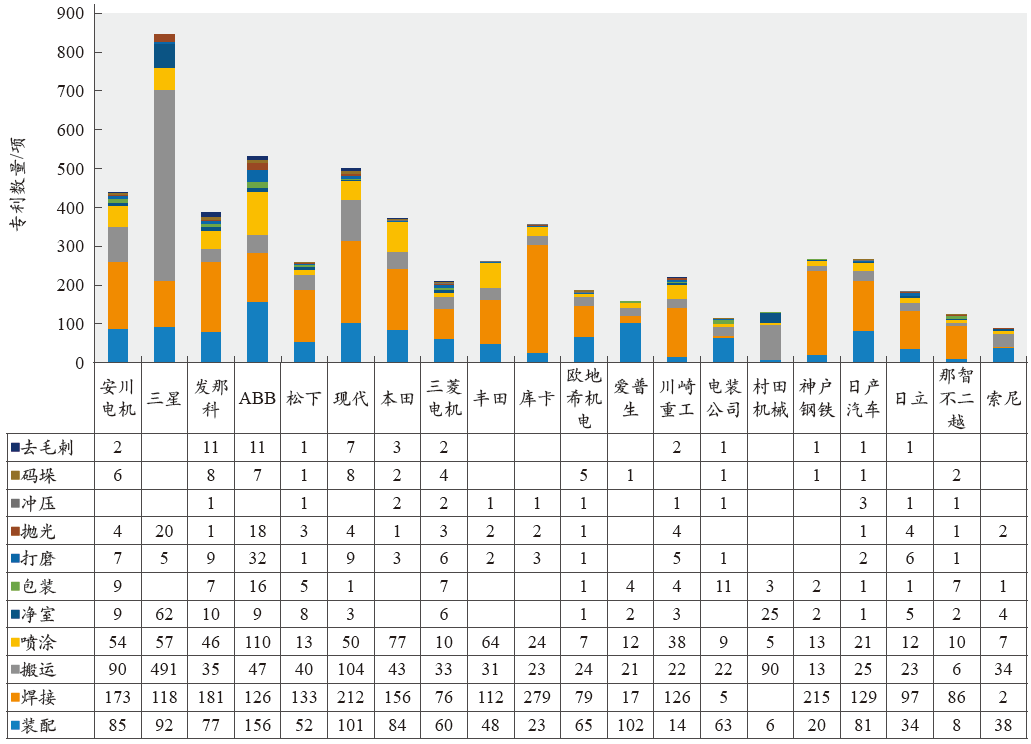
2.5.5 工业机器人的用途
工业机器人的用途主要有装配、焊接、搬运、喷涂、净室、包装、打磨、抛光、冲压、码垛、去毛刺[5]。全球前20专利申请人中,对装配、喷涂、包装、打磨、去毛刺机器人申请专利最多的是ABB(图12)。对焊接申请专利最多的是库卡。对搬运、净室、抛光机器人申请专利最多的是三星。对冲压机器人申请专利最多的是日产汽车。对码垛、去毛刺机器人申请专利最多的是发那科。
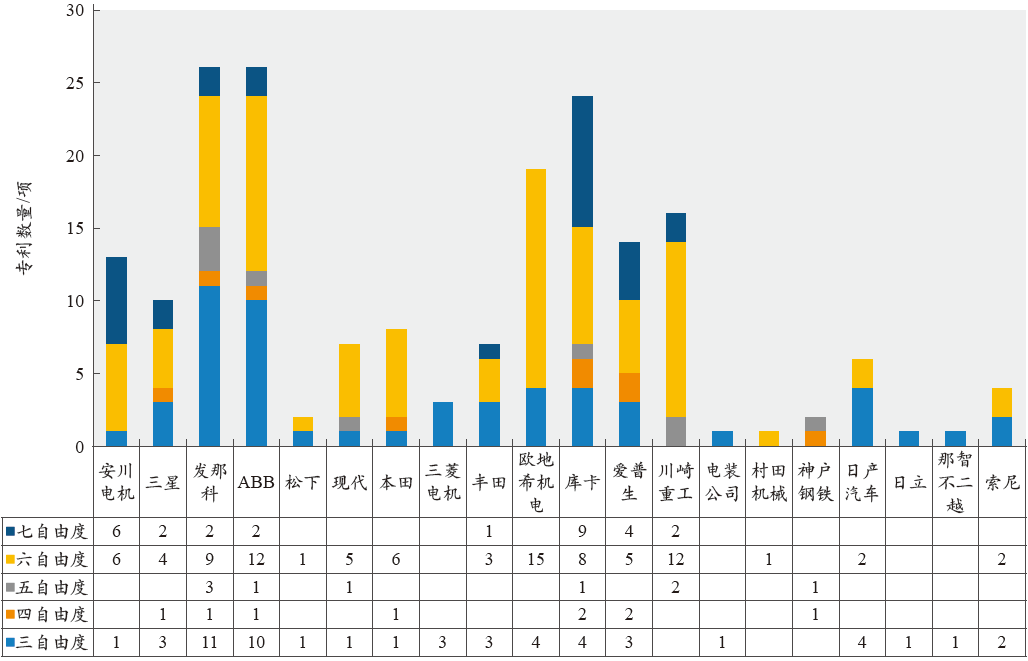
2.5.6 工业机器人的自由度
工业机器人的自由度是一个重要的参数指标。全球前20专利申请人中,对三自由度和五自由度机器人申请专利最多的是发那科(图13)。对四自由度机器人申请专利最多的是库卡和爱普生。对六自由度机器人申请专利最多的是欧地希机电。对七自由度机器人申请专利最多的是库卡。
3 结论及建议
“机器人革命”是以数字化、智能化、网络化为特征的第三次工业革命的有机组成部分。工业机器人的高速发展,一方面可以弥补我国人口红利下降带来的缺口,也是中国成为“智造强国”的希望。
从以上专利分析可以看出,我国工业机器人的发展晚于美国、日本和德国。但是随着我国研发能力的增强,中国的工业机器人的专利申请总量已排到全球第2位。安川电机、三星、发那科、ABB等工业机器人巨头在专利技术申请量上占据绝对优势地位。全球前20位的工业机器人专利申请人中没有中国机构。前20位专利申请人对各关键技术的侧重点不同。相对国外企业雄厚的研发实力、专利技术储备及市场竞争优势,国内企业在对工业机器人驱动类型、机构部件、智能技术、类型、自由度等关键技术的自主创新研发上仍显薄弱。
全球经济形势对中国制造业提出了更严峻的挑战,也为掌握工业机器人核心技术的制造企业带来了转型发展机遇。因此,国内企业一方面需要重视工业机器人的关键技术创新研发,打造企业的核心竞争力,另一方面需要依托国内有实力的工业机器人研发队伍,建立多层次的产学研用紧密结合的机器人技术创新体系,实现创新价值链的有效整合。
The authors have declared that no competing interests exist.
References

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}